1. Introduction
Vibration control technology constitutes a crucial engineering discipline that is extensively applied across various sectors, including machinery, civil engineering, aerospace, automotive, electronics, and construction, as depicted in . The implementation of vibration control technology within diverse fields not only enhances the performance of equipment and structures but also advances society’s pursuit of safety and comfort. It represents one of the indispensable and pivotal technologies in contemporary engineering practices. In recent years, driven by the rapid advancement of information technology and the emergence of artificial intelligence, intelligent semiconductor equipment has emerged as a significant force propelling the progress of modern society. The swift evolution of semiconductor manufacturing technology has also imposed unprecedented and stringent requirements regarding the performance of wafer handling robots [
1].
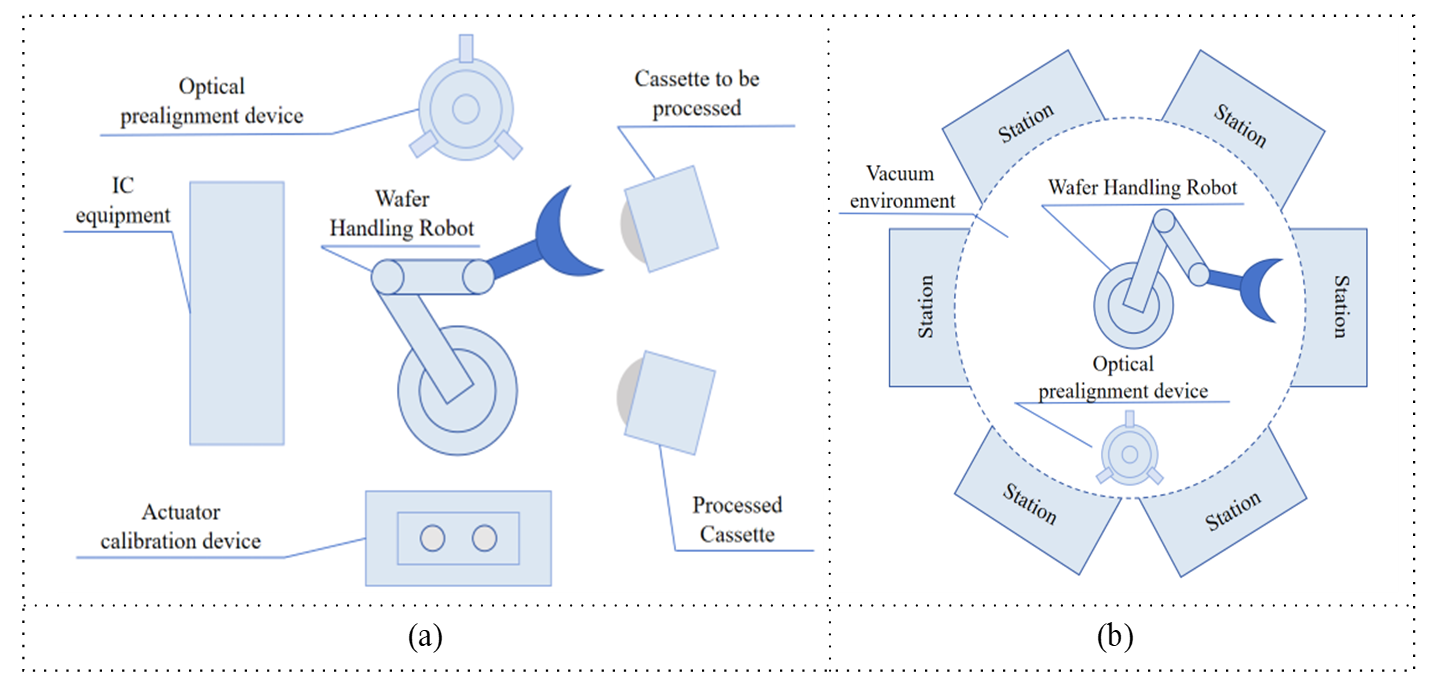
As the line width of integrated circuits moves towards nanoscale, wafer transfer systems need to achieve millisecond-level high-speed motion and sub-micro-level positioning accuracy in ultra-clean or vacuum environments to avoid wafer contamination or mechanical damage caused by vibration. As the core component of the wafer transfer system, the performance of the wafer handling robot directly determines the yield and efficiency of chip production. In ultra-clean environments (such as photolithography and cleaning links), the robot needs to complete the high-precision positioning of the wafer through multi-axis collaboration while avoiding particle pollution caused by vibration, as shown in a; Under the vacuum environment (such as deposition and etching processes), the compact layout of the cluster transmission system puts forward higher requirements for the efficient mass production of robots, as shown in b.
. Research on Related Fields of Vibration Control.
. Schematic diagram of wafer automated transportation system:(<b>a</b>) Ultra-clean Environment Handling System (<b>b</b>) Vacuum Environment Handling System.
However, the intrinsic characteristics of the steel belt drive system (the coupling effect of preload force and dynamic load) cause the joint stiffness to exhibit complex nonlinear characteristics. For example, the dynamic stress fluctuation of the steel belt will significantly change the equivalent stiffness of the joint during high-speed motion, which will lead to the modal migration and terminal vibration amplification of the system. Its nonlinear dynamic behavior and residual vibration seriously restrict the further improvement of the robot’s performance [
2,
3]. This contradiction highlights the limitations of traditional rigid joint models and control strategies, and it is urgent to carry out systematic research around four core directions: dynamic stiffness identification, trajectory planning optimization, intelligent control coordination and broadband vibration suppression: (1) Dynamic stiffness identification and hybrid modeling: Aiming at the time-varying effect of steel strip stiffness, although existing studies try to estimate the stiffness online by optimizing the double-mass equivalent model [
4] or residual observer [
5], the modeling error of static calibration and the adaptability of data-driven methods to transient load sudden changes still need to be optimized. (2) Trajectory-control collaborative optimization: Although the traditional trajectory planning method can improve the smoothness of motion, it does not fully couple the vibration characteristics of flexible joints, resulting in limited residual vibration suppression effect [
6]. It is necessary to combine dynamic zero vibration shaper [
7] and singular perturbation theory [
8] to optimize motion efficiency and vibration suppression simultaneously. (3) Control algorithm optimization: Some scholars have improved the traditional PID algorithm, such as decoupling servo control [
9] and linear expanded state observer [
10], which simplify the control structure through inner loop decoupling and outer loop tracking error compensation, but there are still steady-state errors in strongly nonlinear coupled systems; At present, many intelligent algorithms [
11] (such as neural network and fuzzy control,
etc.) can deal with uncertainty, but their computational complexity is high, which makes it difficult to meet the requirements of microsecond real-time control, and needs to be optimized in the direction of lightweight; (4) Innovation of broadband vibration suppression: Traditional fixed stiffness dampers are effective in narrow frequency band, but their performance drops sharply in the face of robot broadband vibration. Variable stiffness vibration absorber [
12] can effectively solve this problem and effectively broaden the frequency band, but its driving mechanism is complex and its reliability needs to be verified.
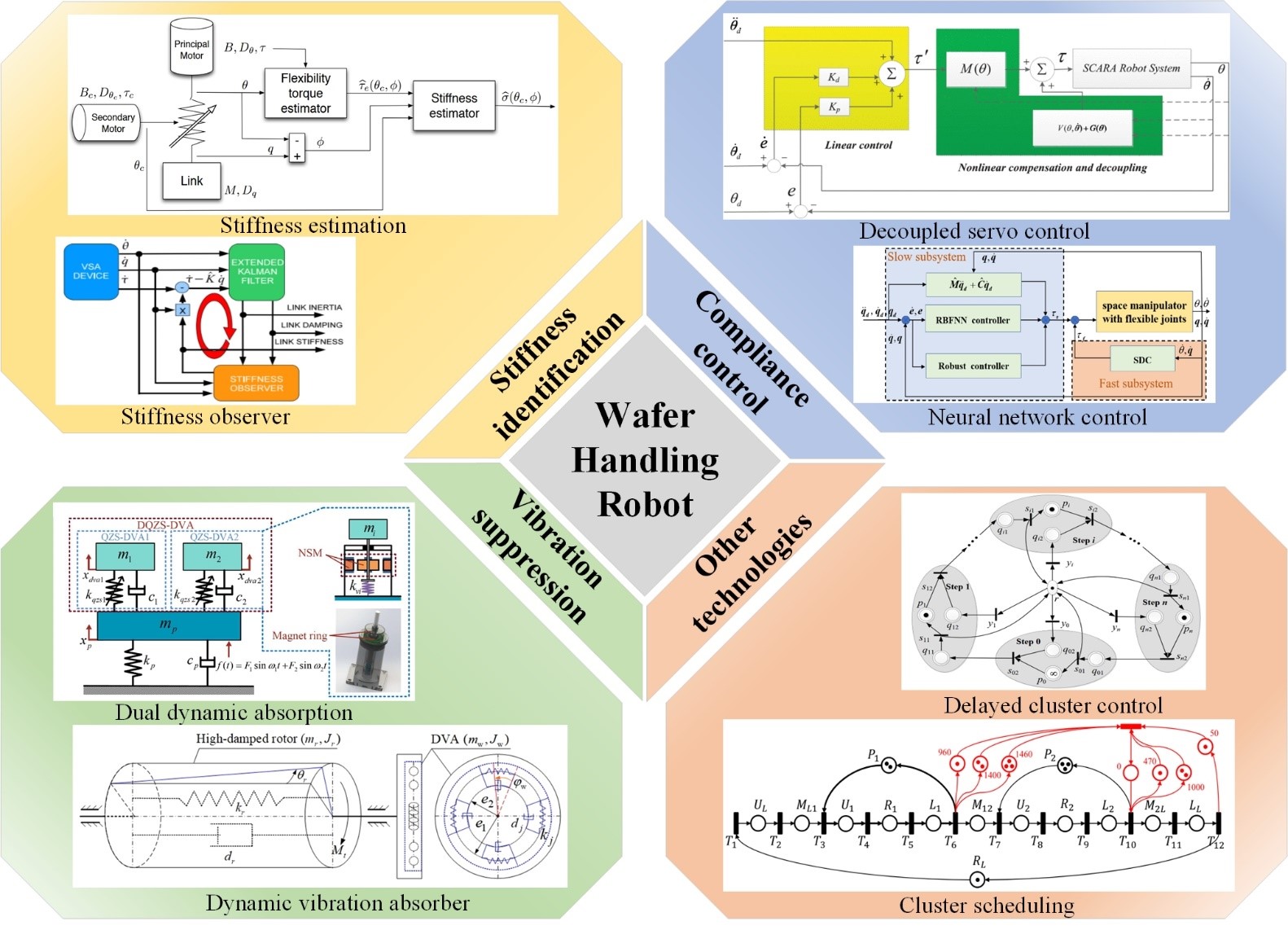
This paper presents a systematic review of the advancements achieved in the aforementioned control domains pertaining to wafer handling robots. The primary structure of this review is illustrated in : Section 2 analyzes the dynamic identification method of joint stiffness, and compares the advantages and disadvantages of equivalent modeling and observer method; Section 3 discusses the collaborative design of trajectory planning and control strategy, and analyzes the industrial feasibility of intelligent algorithms. Section 4 reviews the technological innovation of vibration suppression, focusing on the engineering challenges of semi-active vibration suppression; Section 5 extends to emerging technologies such as predictive maintenance and cluster control; Finally, it summarizes and looks forward to future research directions, emphasizing the integration potential of digital twins and edge computing. By integrating the stiffness identification method of the physical model and data assimilation, the composite control strategy of trajectory planning and model prediction, and the broadband vibration absorption technology, it aims to break through the performance bottleneck under high dynamic load and provide theoretical and practical reference for future research and engineering applications.
2. Identification of Joint Stiffness of Wafer Handling Robot
Variable stiffness flexible joint refers to installing variable stiffness flexible elements between the rigid driving part and the output part of the joint to make the joint have compliant characteristics [
13]. Because the wafer handling robot is driven by steel belt, and the steel belt is a flexible element, it should be pre-tightened in advance, and the stress and strain caused by the force on the steel belt changes during the movement [
14], so the joints of the wafer handling robot are flexible joints with variable stiffness.
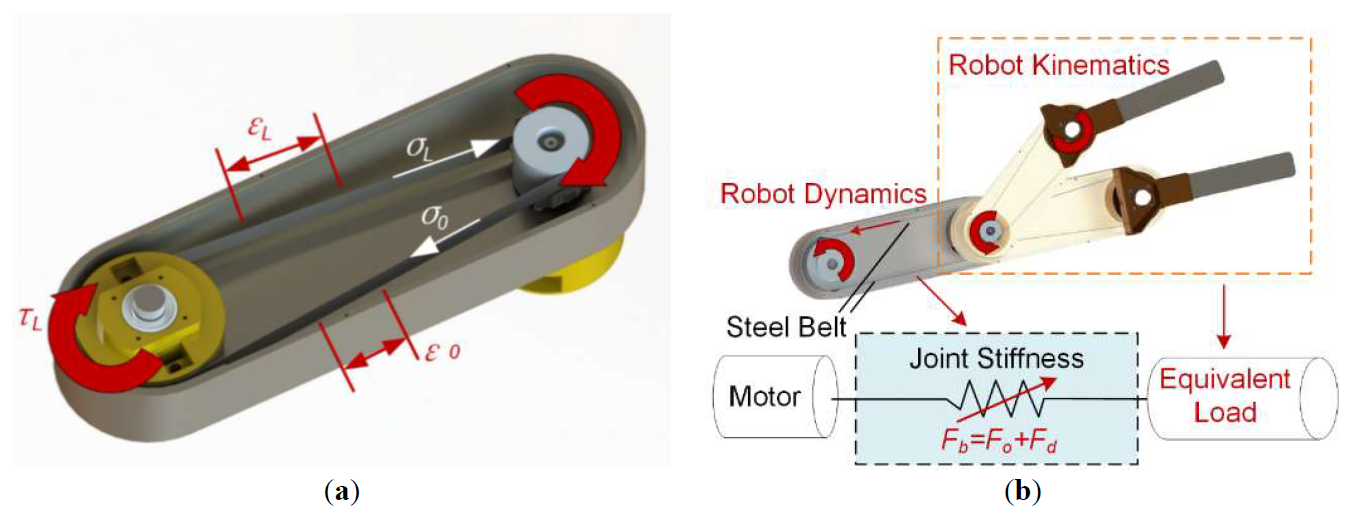
In view of the above analysis, the steel belt can be equivalent to flexible transmission, and the motor-steel belt-load can be equivalent to a two-mass system. On the basis of the two-mass system, the stress-strain of a single steel strip changes in real time due to the influence of robot dynamics and steel strip pre-tightening force. At the same time, the robot kinematics always affects the equivalent load of the driving joint, resulting in time-varying and instantaneous joint stiffness and mode. The equivalent results are shown in . The stiffness identification function of variable stiffness flexible joints is fundamental to ensuring the motion performance of the system, significantly mitigating the impact of stiffness variations on system vibrations [
15]. Concurrently, stiffness identification serves as a prerequisite for controlling joint dynamic stiffness and motion compliance, necessitating real-time precision and accuracy, and represents a critical technology in the research of variable stiffness joints.
The stiffness identification process for flexible joints with variable stiffness involves identifying, estimating, and optimizing the system’s physical parameters, subsequently determining joint stiffness through an identification algorithm. This process primarily encompasses static and dynamic stiffness identification. The static stiffness identification method can accurately obtain joint related parameter information by applying sensors, so as to realize joint stiffness identification under specific conditions. However, this identification method cannot interact with unknown environment, and cannot identify real-time dynamics online, which makes it difficult to meet the needs of human-computer interaction. Consequently, contemporary researchers primarily focus on dynamic stiffness identification.
Scholars at home and abroad usually adopt two methods to identify the dynamic stiffness of industrial robots. One is to model the joints as flexible joints. The stiffness value of each component of the robot is calculated by an empirical formula, and then the stiffness value is converted to each joint of the robot to get the stiffness value of the joint. The other is to use the dynamic observer method to carry out identification experiments. The following will study and analyze it from two aspects.
. Force relationship (<b>a</b>) and equivalent dynamic model (<b>b</b>) of steel belt transmission mechanism.
The stiffness identification of variable stiffness joints is carried out by using the empirical modeling method, which mainly considers the nonlinear flexible dynamic stiffness of variable stiffness joints due to adjustable stiffness, that is, based on the dynamic model, the time-varying nonlinear stiffness of flexible joints is estimated. However, modeling methods often have various errors with reality, so scholars need to improve methods or accurate models to reduce possible errors and improve the accuracy of modeling.
Many researchers have done a lot of research in modeling. In order to improve the identification accuracy, it is necessary to eliminate the influence caused by external factors as much as possible. For example, Cong et al. [
16] This paper presents a magnetic fluid seal device for robots, which is equipped with coaxial biaxial magnetic fluid rotary seal and bellows seal wafer processing robot, and constructs an optimized biaxial magnetic fluid seal experimental platform, which reduces the influence caused by other environmental factors and improves the modeling accuracy. It is very helpful for the subsequent stiffness identification research.
Some researchers choose to estimate and compensate for the deviation. For example, Chen [
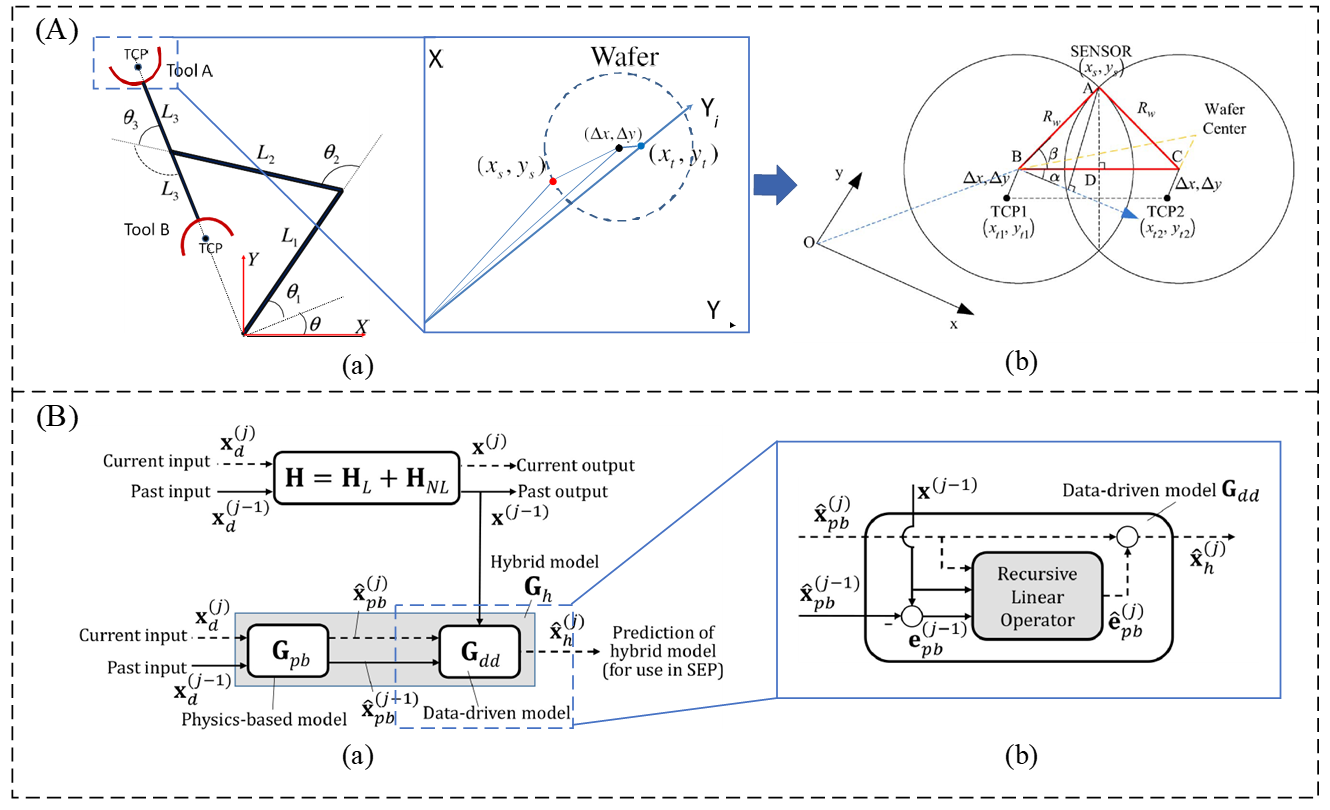
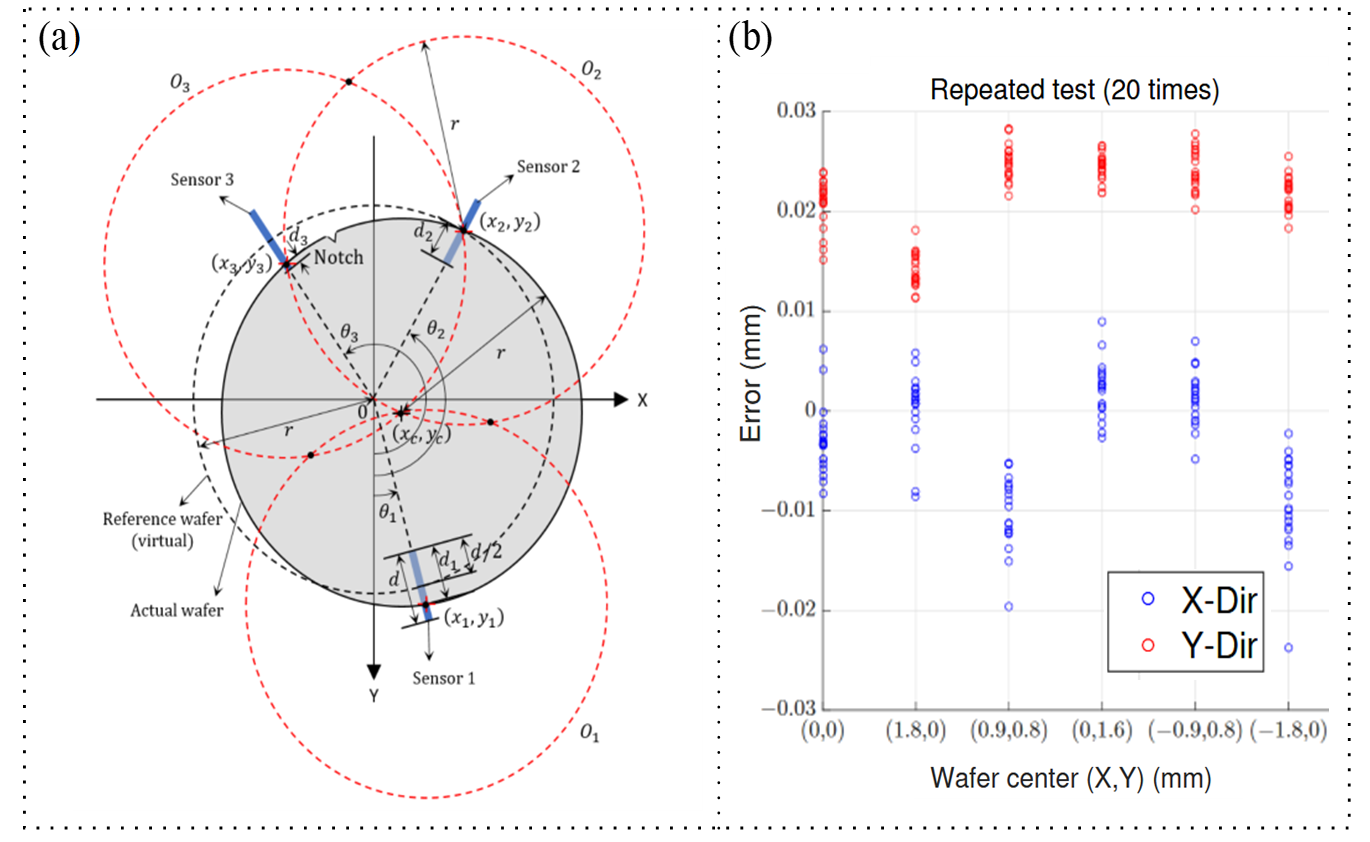
17] estimated the eccentricity of the wafer and modeled the error of wafer handling robot. By dynamically estimating the eccentricity of the wafer, the error in the wafer handling robot model was analyzed to improve the accuracy of the model. The developed method has great reference for the wafer robot modeling.
Servo error pre-compensation is usually used to improve the accuracy of the feed drive. Existing servo error pre-compensation methods usually involve using physics-based linear models to predict servo errors, but they are inaccurate due to the unmodeled nonlinear dynamics in the feed drive. Cheng et al. [
18] proposed a linear hybrid model for servo error pre-compensation, which combines physical-based and data-driven linear models. It is proved that the proposed model can approximate the unmodeled nonlinearity in the physics-based linear model. Compared with the physics-based model, the proposed hybrid model improves the accuracy of servo error prediction greatly in the experiment of precision feed drive. Two people through two different error estimation methods to achieve the flexible joint modeling, from different aspects of the effectiveness of the error estimation method, wafer handling robot flexible joint modeling has great reference significance. The models are shown in .
. (<b>A</b>): Simplified mathematical model (<b>a</b>) and error estimation model diagram (<b>b</b>) of wafer handling robot [
17]; (<b>B</b>): Error compensation hybrid model (<b>a</b>) model framework (<b>b</b>) [
18].
The joint model of the wafer handling robot is always nonlinear, with multi-input and multi-output, and its parameters are coupled. Therefore, many scholars solve the problem by establishing new models and decoupling them in different ways. For example, Yue et al. [
19] proposed a Cartesian stiffness model of hybrid robots, which is used to identify the stiffness of robots, and integrated the elasticity of links and joints in parallel mechanisms into the flexibility (inverse ratio of stiffness) parameters at limb level. By identifying compliance parameters at the limb level rather than at the joint/link level the number of parameters to be identified can be significantly reduced and the complexity of the identification problem can be reduced. The results show that the prediction deviation of end-effector deflection identified by estimation is less than that estimated by the linear least square method, which proves its stronger robustness. Wu et al. [
20] proposed a decoupling control method of stiffness and position of variable stiffness joint for the first time, aiming at the joint flexibility and wear state in the driving process of mechanical parts, which realized the unity of joint position control and joint flexibility. The joint stiffness model is obtained by using the static relationship between the Jacobian matrix and the model, and the nonlinear equation composed of the mechanical model and the stiffness model of the variable stiffness device is solved by the optimization method to realize the nonlinear decoupling of the stiffness and position of the variable stiffness joint. The feasibility and effectiveness of the proposed compliance control scheme are analyzed and verified by simulation experiments. Menard et al. [
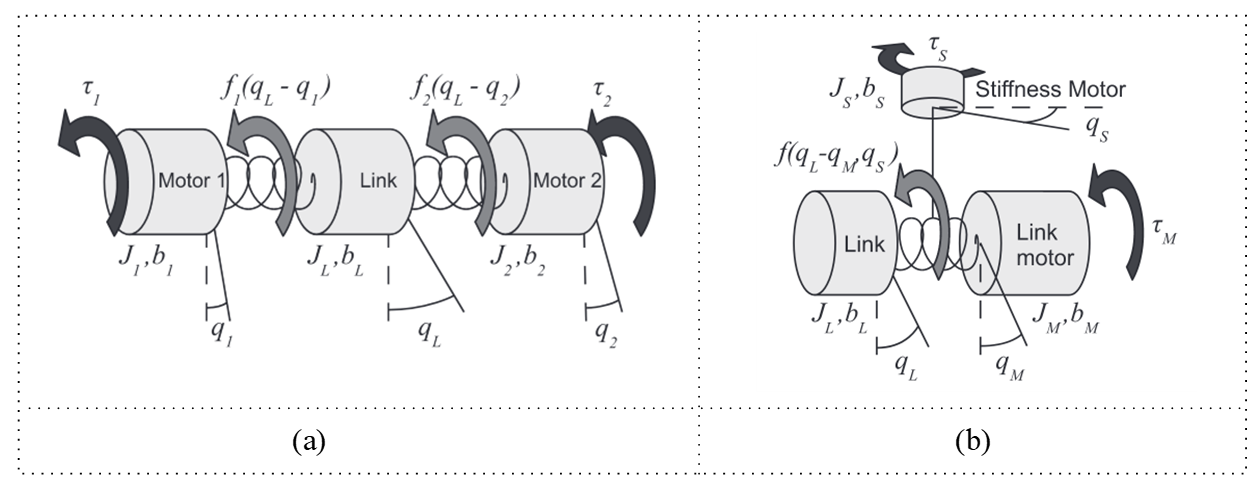
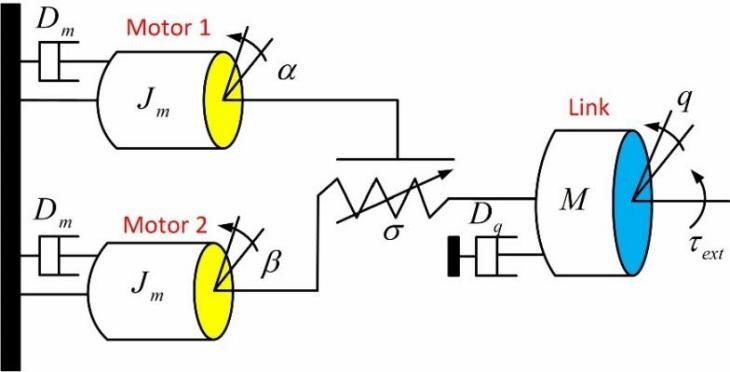
21] studied the problem of real-time estimation of time-varying stiffness of actuators with different variable stiffness in agonist-antagonist structure and analyzed the stiffness by two-step modeling. First, computational calculus is used, which provides the relationship between the position/speed of the motor and the connecting rod, the torque and stiffness of the motor. Secondly, the dynamic stiffness is obtained by combining the obtained relationship with polynomial approximation of stiffness and recursive least squares algorithm, and the accuracy of the method is verified by simulation and experiment. The different types of variable stiffness actuators are shown in . Meng et al. [
22] established an effective online stiffness control method, introduced extended Kalman filter to absorb two parts of information from the online identification method and system mathematical model, and assimilated the two pieces of information obtained by making full use of these two methods. The estimation accuracy of initial stiffness identification is improved, and the method is robust to system conditions.
. Different types of Variable Stiffness Actuator: (<b>a</b>) Agonist—antagonistic VSA; (<b>b</b>) Explicit stiffness variator; [
21].
The dynamics of the wafer handling robots mainly describe the relationship between joint output torque and robot motion. In the transmission process, the forces borne by the steel strip include the pre-tightening force of the steel strip and the pulling force produced by robot motion. The pre-tightening force is fixed. Because the mode of the joint is related to the load and stiffness, the dynamics dynamically changes the equivalent stiffness of joint, while the kinematics of the robot leads to the real-time change of the equivalent load of the robot joint, which also affects the mode of robot joint [
23]. Therefore, through precise modeling based on the principle, the mechanism of the joint stiffness change in the working process of the robot can be revealed, which can lay a solid foundation for the subsequent development of variable stiffness controller.
2.2. Observer Stiffness Identification
Stiffness identification is considered from the point of view of pattern recognition by using dynamic observer, and then the modeling of nonlinear system can be avoided by using artificial intelligence algorithm, and the identification can be completed well, but there are some problems such as a large amount of calculation, slow convergence speed and a large amount of data needed.
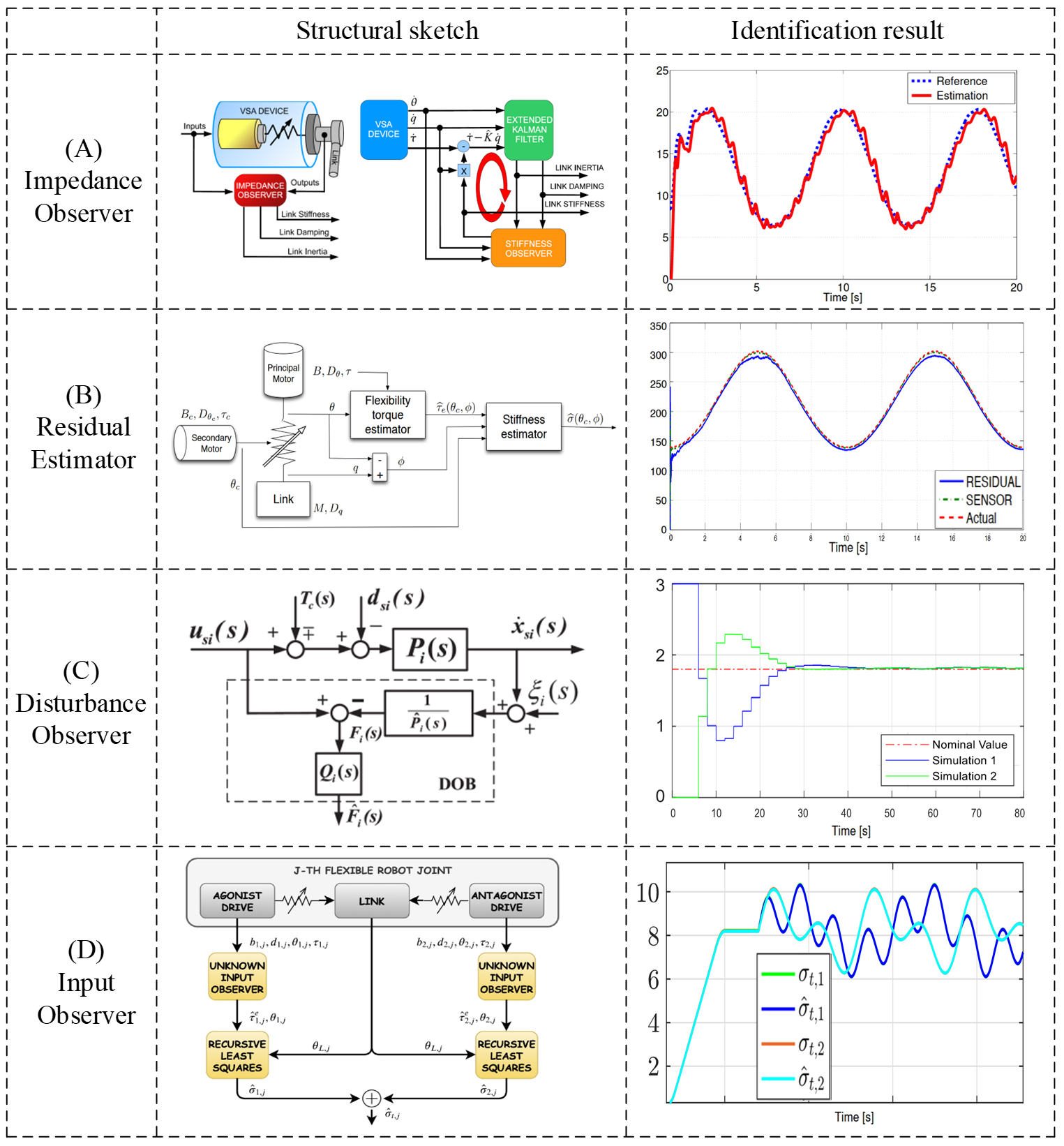
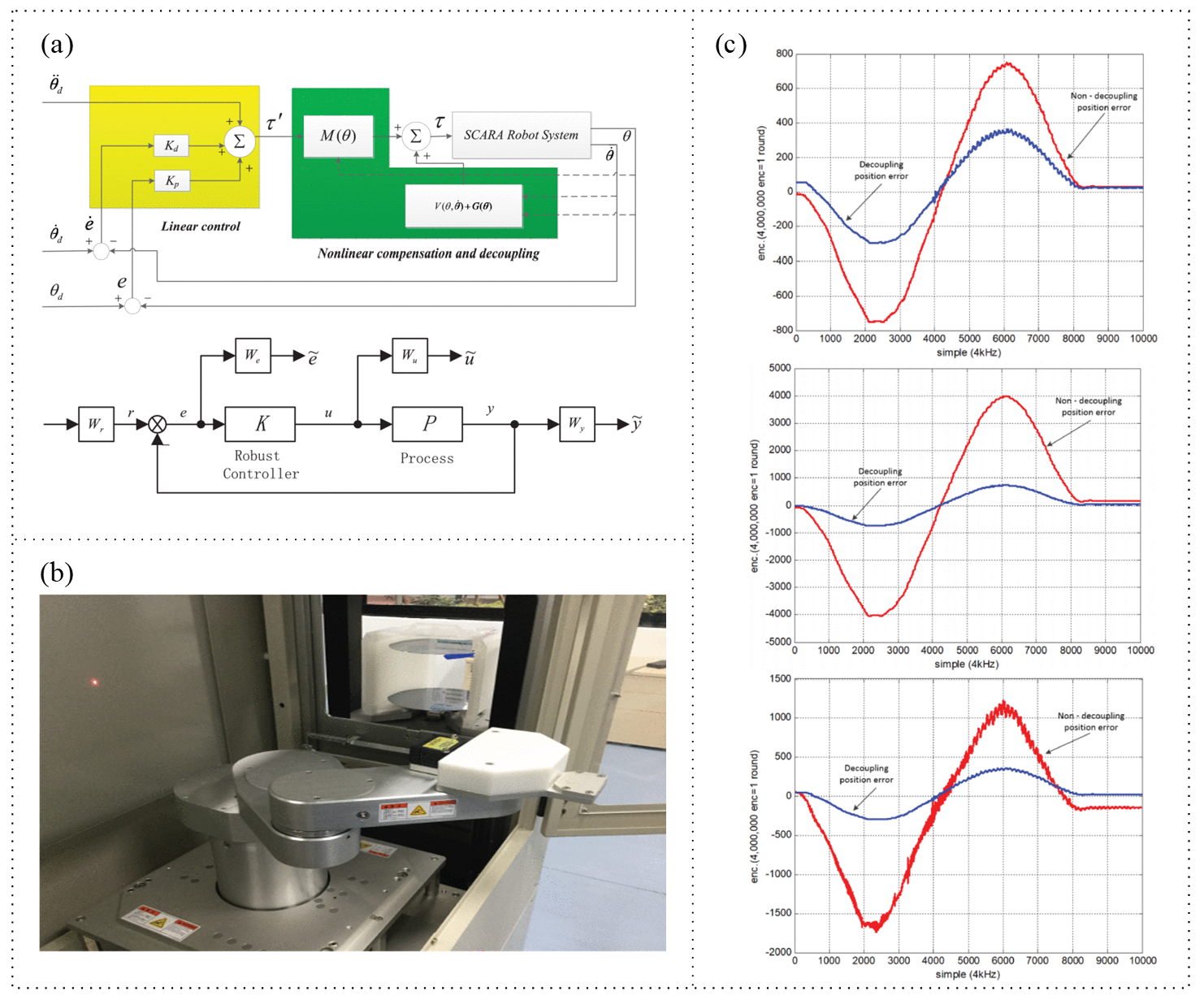
Many scholars have designed stiffness estimators based on different observers and estimators for flexible robot joints, which are used to estimate the nonlinear time-varying dynamic stiffness of variable stiffness joints. All of them have obvious advantages in stiffness identification from different angles. For example, based on impedance observer, Serio et al. [
24] designed a dynamic observer, which was improved by combining extended Kalman filter for offline calibration and then decoupling for torque and position measurement. The identification of stiffness and inertia parameters of joints is realized, but the feedback position still needs to be differentiated, and the noise sensitivity is high, as shown in A; Based on the residual estimator, Flacco et al. [
25,
26] used the residual method to calculate the joint force and realize the joint stiffness estimation. Then, in order to solve the problem of convergence and noise under weak excitation, the stiffness estimation method is divided into two steps. First, the residual method is used to estimate the external moment, and then the online stiffness identification is realized by combining the improved discrete Kalman filter method and the least square method with forgetting factor, as shown in B. Lin et al. [
27] proposed a dynamic stiffness estimator composed of a residual-based estimator and a parametric stiffness observer. Firstly, the static stiffness is given by theoretical analysis, and then the dynamic stiffness identification is divided into a flexible torque estimator based on second-order residual and a weighted modified parametric stiffness observer based on dynamic stiffness. Simulation proves high accuracy and robustness. In order to overcome this problem caused by inaccurate transmission torque information, Jinoh et al. [
28] analyzed the limitations of traditional methods in the frequency domain and proposed enhanced residuals that can be used in a wide range of stiffness. Expands the availability of residual-based techniques.
Based on the disturbance observer, Sheng et al. [
29] designed the control system with two disturbance observers and, used the dynamic equations to deduce the relationship from the motor to the coupling mechanism, and the modeling results are used to identify the algorithm of model parameters. Damping, stiffness and other parameters of gantry system driven by ball screw are identified. The proposed method is easy to implement in position control loop and speed control loop, as shown in C. Based on the input observer, Adriano et al. [
30] put forward a stiffness identification method of a flexible joint based on the joint and motor position without torque and speed sensors, which has strong linearity advantage by treating the flexible torque acting on each motor as an unknown signal and based on the theory of unknown input observer, as shown in D.
. Various typical observer and estimator systemstructural sketch and identification results: (<b>A</b>): Impedance Observer [
24]; (<b>B</b>): Resiual Estimator [
26]; (<b>C</b>): Disturbance Observer [
29]; (<b>D</b>): Input Observer [
30].
Joint stiffness identification is the core foundation of vibration control of the wafer transfer robot. Existing research mainly focuses on equivalent flexible joint modeling and dynamic observer method. Although researchers have further studied dynamic stiffness identification methods, various methods still have different degrees of optimization space.
Equivalent modeling methods (such as two-mass systems) simplify the dynamic characteristics of stiffness through physical models, which have the advantages of transparent theory and strong interpretability of parameters, and are especially suitable for static or quasi-static working conditions. However, the time-varying load and nonlinear stress-strain relationship driven by the steel belt lead to significant model errors, which depend on high-precision sensors and complex calibration processes, and it is difficult to meet the real-time requirements in practical applications.
Dynamic observer methods (such as residual error method and Kalman filter) realize real-time stiffness estimation through data-driven method, avoiding complex modeling process. The residual-based method performs well under weak excitation, but is sensitive to noise and computationally intensive, making it difficult to apply stably in high-frequency motion scenarios. In contrast, the hybrid method combined with parameter observer strikes a balance between robustness and accuracy, but it relies on offline calibration data, which limits the adaptability when dynamic loads change suddenly.
In terms of industrial feasibility, equivalent modeling is more suitable for laboratory environments or offline parameter calibration, while dynamic observers have more potential in online control, but the algorithm’s efficiency needs to be optimized to adapt to embedded systems. Future research needs to explore physics-data hybrid models to mechanistically reduce the impact of stiffness changes on the system, and combine real-time sensor feedback and lightweight AI algorithms to deal with transient load problems.
3. Control Strategy of Wafer Handling Robot
Wafer handling robots have been widely used to process silicon wafers in semiconductor manufacturing machines. However, their accuracy, speed and versatility are limited by vibration, which varies with their position in the workspace. One of the main challenges of controlling wafer processing robots is to avoid vibration as much as possible during high-speed motion, which is the main cause of wafer sliding and particle pollution.
In order to improve stiffness and reduce vibration, the robot adopts parallel structure, but it cannot meet the requirements of high-precision control. The control of the whole system is affected by many factors, among which the control algorithm, assembly accuracy and machining accuracy of each component are the main influencing factors. Moreover, the vibration caused by structural factors is difficult to detect by the motor encoder and control by the motor. According to the current processing technology, the precision of components is already very high, and it needs to pay a lot of economic costs to further improve the precision of components. It is not appropriate to comprehensively consider the perspective of improving the precision of components, but optimizing trajectory planning and optimizing control algorithms is a better idea.
3.1. Trajectory Planning Research
Robot trajectory planning is very important for robot motion control system, which directly affects the performance of robot, which is reflected in many aspects such as operation efficiency, motion stability, energy consumption,
etc. For specific robot trajectory planning problems, it is necessary to comprehensively consider the actual needs. Robot cluster tools used in semiconductor manufacturing have strict time constraints, and robot motion should not only consider efficiency, but also run smoothly, which requires smooth trajectories without sudden changes in acceleration [
31,
32], as shown in A. Robot motion planning is also one of the most important problems in robot control. If time optimality and stationarity are considered synthetically, trajectory planning is a smooth time optimal trajectory planning problem.
Most existing online trajectory generators aim to achieve good tracking performance by limiting the bandwidth of the reference input. This strategy is unacceptable when applied to wafer handling robots pursuing high speed. Many scholars have studied this problem, such as Kim et al. [
33] modeling the discrete event behavior of tools through timing event diagrams. A feedback controller has been developed for single-arm and dual-arm cluster tools, which can meet the time limit by adjusting wafer delay. So that it does not exceed the prescribed limits. There are also studies on the acceleration of handling robots, such as Wang et al. [
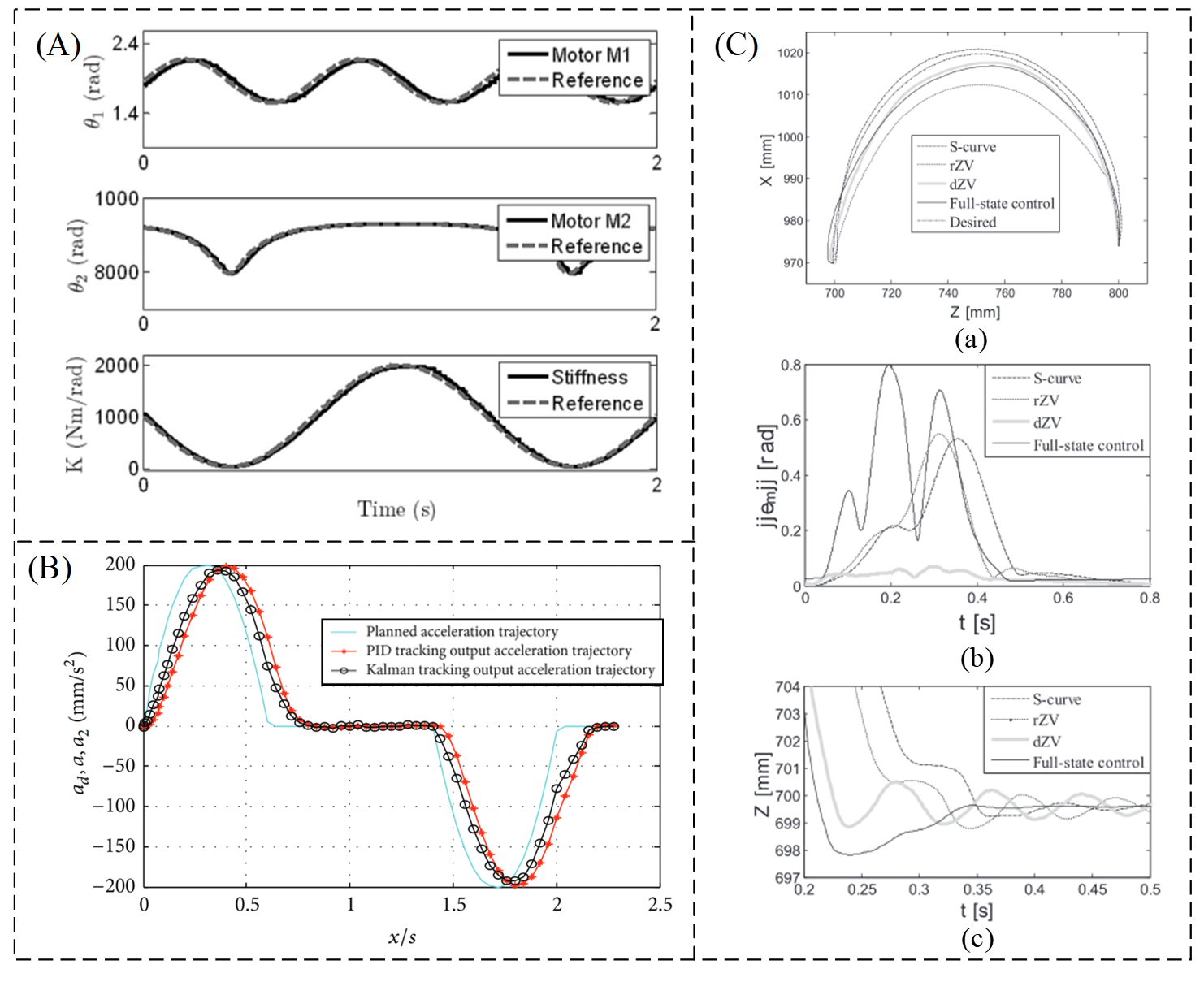
34], in order to solve the problems of large distance, high speed and high precision trajectory tracking. In order to ensure the stability of wafer transport robot, combined with the new section search method, a fifth-order polynomial interpolation method is proposed to plan the motion process of wafer transport robot and realize the optimal planning curve. And its effectiveness is proved, as shown in B.
Some scholars have studied the trajectory planning of flexible joint vibration suppression, which is also of great reference significance to the trajectory planning of wafer handling robots. For example, Kim et al. [
35] proposed several new methods of robot vibration suppression input shaping technology. That is, the optimal S-curve trajectory, fixed zero-vibration shaper and dynamic zero-vibration shaper. These methods can suppress various vibration modes of flexible joint robot under computational torque control based on rigid model. Each planning method has its own characteristics and is suitable for different motion modes, as shown in C. The following year, Kim et al. [
36] proposed a new trajectory planning method for online optimal trajectory planning of flexible joints, which is optimal in dynamic approach time and maintains the integrity of path tracking in high frequency planning and control cycles. This method is based on the well-known path constrained time optimal motion. We show that this trajectory can be approximated quickly by trapezoidal velocity curve, so as to produce a trajectory close to the time optimization, and only four times of robot dynamics calculation are needed for each path segment. Finally, it is successfully applied to the elastic model.
. Research renderings of different trajectory planning, (<b>A</b>): Angle and stiffness tracking comparison results [
31]; (<b>B</b>): Acceleration comparison results [
34]; (<b>C</b>): Effect comparison of different planning methods: (<b>a</b>) Controlled paths (<b>b</b>) Tracking errors on the line side (<b>c</b>) Residual vibratiosns in Z-direction [
35].
To sum up, trajectory planning of robot is essentially a constrained optimization problem, and there will be different research fields of trajectory planning for different constraints and optimization objectives. In the application of wafer handling robot, it is necessary to ensure efficiency and run smoothly, and it is also necessary to consider the problem of flexible joints. Many scholars have done research independently from the above perspective, but few studies have integrated the above research into wafer handling robot.
3.2. Compliance Control Techniques
Through reading a large amount of data at home and abroad, we can see that many researchers start with control algorithms to improve the control accuracy of the system, and then reduce vibration and improve the running speed. At present, the main methods used are improving the traditional PID control algorithm and merging with other algorithms and various modern optimal control algorithms, such as neural network control, synovial control, fuzzy logic control, adaptive control, and so on.
However, for wafer handling robot, the joints have highly nonlinear dynamics and strong connection, so it is difficult to achieve good dynamic and stable performance by traditional methods, so it is necessary to comprehensively consider the application of control algorithms to robots. This review introduces several typical control methods in wafer handling robots.
3.2.1. Improved PID Control Technology
In practical application, traditional PID control is still the mainstream control. However, for flexible variable stiffness joint, it is nonlinear in normal working state, so the control effect realized by traditional PID control method is not ideal. It is necessary to add other control algorithms on the basis of traditional control, and then take the integrated algorithm as the algorithm of the whole system controller.
Many scholars have done a lot of innovative research on the basis of classical PID control theory. In recent years, with the development of nonlinear control, decoupling servo control has attracted much attention. Many scholars have also applied it to wafer handling robots, which can obtain decoupling relationship through internal feedback loop and maintain system stability through external tracking error loop. Decoupling control is a very good choice for complex systems with various uncertainties and high frequency resonance, such as wafer handling robots. Han et al. [
37] combined with the mechanical and software architecture of wafer handling robot, analyzed the robot kinematics by geometric method, decoupled the motion control from polar coordinates and joint space, and calibrated it by generalized least square inverse method. The center algorithm for motion control and wafer calibration of wafer handling robot in semiconductor manufacturing was studied, and the correctness, feasibility and effectiveness of the motion control and center correction algorithm of semiconductor robot were verified by experiments, which met the requirements of robot wafer transfer, as shown in a,b. In addition, on the basis of PD control, He et al. [
38] proposed a new coordinated control method based on decoupling servo control to design for wafer handling robot. As the basis of decoupling servo control, the dynamic model of wafer handling robot is obtained by Newton-Euler equation and Lagrange equation. These two methods confirm the validity of the kinetic equation. The inverse dynamics of the robot is analyzed by feedback linearization, and the experimental results show that the control method can effectively reduce the position tracking error. The performance meets the requirements of high speed and high precision in wafer processing, as shown in c. Other researchers combine visual systems and adopt servo control strategies. Such as Xiao et al. [
39] and designed a control system. The system takes PLC as the control core, is responsible for the communication between PC and robot, and executes logic control instructions. He et al. [
40] can realize precise positioning and control decoupling of wafers through visual alignment. The reliability of visual servo control strategy is verified by simulation and physical prototype of wafer handling robot. The performance meets the requirements of wafer processing process.
In addition to decoupling servo control, singular perturbation theory is also very effective in controlling flexible joints. When the stiffness of flexible joints with variable stiffness is large enough, the model of flexible joints with variable stiffness can be regarded as a system with fast and slow time domains. Singular perturbation control methods are generally divided into two kinds. One method is to select the motor tracking error as the fast variable, and the corresponding one is to select the connecting rod variable as the slow variable. Another method is to choose the joint elastic force as the fast variable, and at the same time, the connecting rod variable is selected as the slow variable; Singular perturbation method has the advantage of order reduction, and its algorithm is simple and clear, which can greatly reduce the calculation workload when considering elastic structures and obtain better control effect. The trajectory tracking problem of variable stiffness joints has been studied by many scholars based on singular perturbation theory. In the control system design, the motor tracking error is selected as the fast variable, and Javadi [
41] and others model the motor dynamics as the time delay input of the antagonistic variable stiffness actuator. In addition, the nonlinear transformation of the antagonistic variable stiffness actuator is introduced, and then the super-twist sliding mode control is used to achieve position and stiffness tracking at the same time. Combining nonlinear transformation with super-twisting sliding mode control, the dynamic tracking of joint position and stiffness is realized at the same time. Prediction-based feedback, together with some disturbance observers, involves estimating external disturbance to compensate for input time delay, which improves the robustness of the system and achieves success in weakening the effect of external disturbance. The schematic diagram is shown in . Another research on selecting joints as fast variables, such as Roozing et al. [
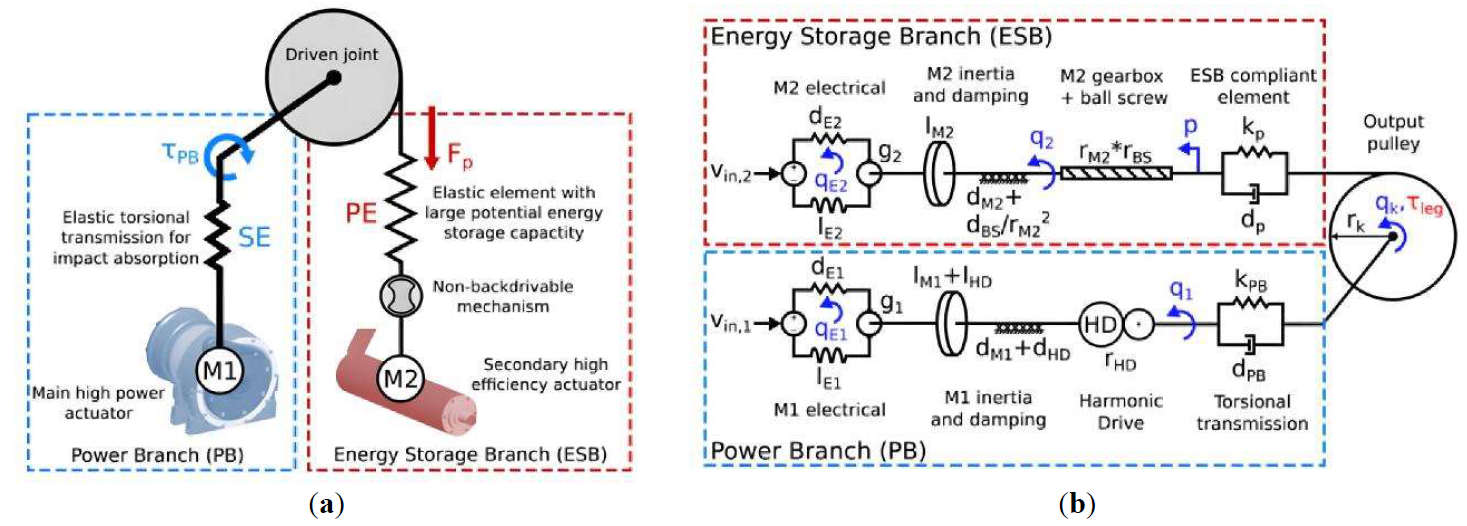
42], designed the distribution mode of driving force for simulating variable stiffness joints driven by antagonistic tendons, which improved the energy efficiency. A new asymmetric antagonistic driving scheme is developed and controlled, which is characterized by large energy storage capacity and effective motion execution. Asymmetric design consists of two driving branches, and its power is transmitted to a single joint through two flexible elements with different stiffness and storage capacity characteristics. Given design parameters and control requirements, the selection criteria of stiffness of the two components are expounded, and the principle is shown in .
. Research on Decoupling Control: (<b>a</b>) Control Structure Diagram; (<b>b</b>) Robot Body; (<b>c</b>) Control Effect Diagram [
38].
. Schematic diagram of AVSA with two drive motors affected by input delay [
41].
. Concept diagram of joint (<b>a</b>) and dynamic model of actuator (<b>b</b>) [
42].
In view of the above research, the differential equation can be dynamically decomposed into quasi-steady system and boundary layer system by taking instantaneous joint stiffness as the system time scale and combining singular perturbation theory; For the boundary layer system, the active damping coefficient is set, and the velocity error between the load end and the input end is fed back to the system input to reduce the influence of vibration on the system. However, the application of singular perturbation control method also has some limitations. When the stiffness of joints is large enough or the model of flexible joints is reduced, the effect is better, and there is still room for change in the application of wafer handling robot.
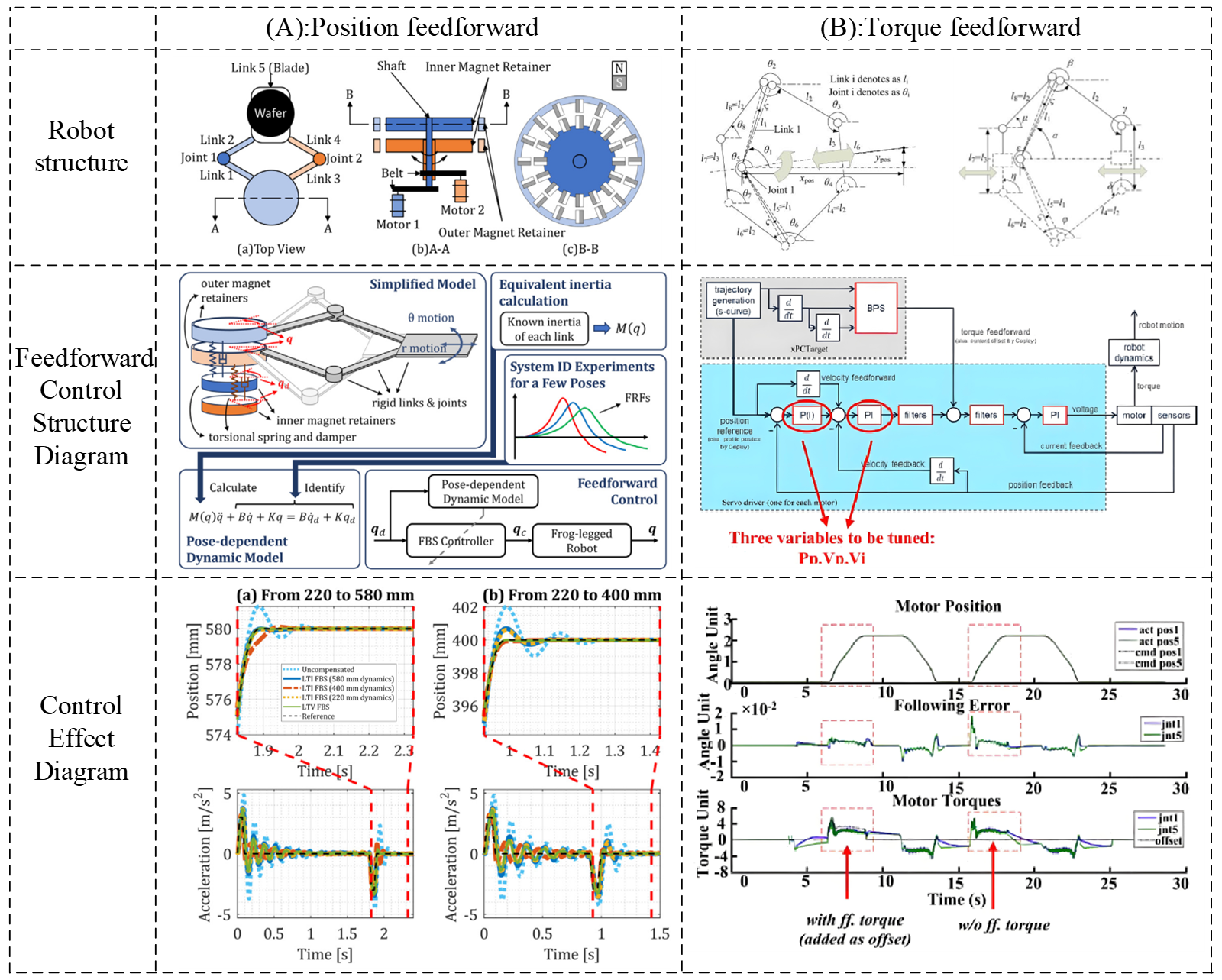
There are also many researches on control based on posture kinematics model and dynamics model. A promising vibration compensation method is to use feedforward control, which is realized by modifying the trajectory sent to the vibration machine. For example, Chou et al. [
43] proposed a method to model the posture-dependent vibration of wafer handling robot as a function of its changing inertia and its experimentally determined joint stiffness and damping. The proposed modeling method first calculates the pose-dependent equivalent inertia of the system, then carries out some system identification experiments to determine the constant stiffness and damping coefficient, and then combines them to predict the dynamics under any pose. The attitude dynamics model of the wafer handling robot is used to design a feedforward tracking controller to compensate the attitude-dependent vibration of the robot. In order to enhance the tracking performance of the robot, it has a good effect, as shown in A. For example, Yu et al. [
44] proposed two control methods to improve the performance of wafer handling robot. Firstly, besides the basic three-loop PID feedback controller, torque offset is injected into the input of the robot, and feedforward is used to compensate the nonlinear dynamics of the robot. Secondly, a test-based optimization method is developed to adjust the gain of the feedback controller. The wafer vibration is measured and analyzed to score the system performance against the derived model. The related control effect is shown in B. The comparison results indicate that position feedforward significantly enhances the robot’s tracking performance, while torque feedforward improves its anti-interference capabilities, leading to superior dynamic effects. The two proposed control schemes markedly enhance performance across various dimensions.
Figure 12. Research on Two Typical Feedforward Control: (<b>A</b>): Positon feedforward [43]; (<b>B</b>): Torque feedforward [44].
To solve the problems of parameter uncertainty, unknown bounded friction torque, unknown bounded external disturbance and residual vibration, the ADRC method is firstly proposed by optimizing the classical feedback linearization control method. The core of this method is the extended state observer. The proposed technique does not need an accurate mathematical description of the system, because it is based on the on-line estimation and feedback of unmodeled dynamic elements and has good robustness [
45]. For example, Guo et al. [
46] combines linear extended state observer to control the position and stiffness of variable stiffness joints. A new conceptual model of antagonistic variable stiffness brake based on equivalent nonlinear torsion spring and friction damper is presented. A combination of linear extended state observer, sliding mode control and adaptive input saturation compensation law is used to design a robust tracking controller, and the position and stiffness of the torsion spring-based variable stiffness actuator against equivalent nonlinear are adjusted simultaneously. Under the proposed controller, the semi-globally uniform ultimate bounded stability of the closed-loop system is proved by Lyapunov stability analysis. Lukic et al. [
47] proposed a cascade control structure for simulating the simultaneous control of position and stiffness of variable stiffness actuators driven by antagonistic tendons. The outer loop is composed of position and stiffness closed loops, and the inner loop is constructed by dominant dynamics, which can reduce system oscillation. Wisnu et al. [
48] aims at the residual vibration caused by the high-speed operation of the transmission manipulator. They propose an integrated tool for parameter identification and vibration control of higher mode vibration systems. Using input shaping method to reduce residual vibration can help industrial personnel analyze and solve vibration problems. Experimental results show that the stability time and total motion time of the robot arm are significantly reduced. Kim et al. [
49] analyzed from the wafer point of view and proposed an improved wafer alignment algorithm, which can obtain the relative distance between the wafer center and the robot hand, as shown in . Some advantages of the proposed alignment algorithm include that it can be designed with low cost and less computational power. The proposed alignment algorithm is applied to the transfer robot of semiconductor processing, and the performance of the method is verified.
The above research provides a basis for the application of semiconductor wafer handling robot, and provides a reference for more accurate control of wafer handling process. Many control methods are perfect enough, but due to the dynamics and nonlinearity of modeling, there are inevitably some inaccuracies in the model. After that, the research can continue to improve the model accuracy and nonlinear model parameter identification modeling direction. On the basis of accurate modeling, the application of the above control method will get twice the result with half the effort.
. Schematic diagram of alignment configuration system algorithm (<b>a</b>) and control effect comparison diagram (<b>b</b>) [
49].
3.2.2. Intelligent Algorithm Control
Because the wafer handling robot is composed of several joints coupled together, it is difficult to achieve good dynamic and stable performance by traditional methods. With the research of neural network, fuzzy control and artificial intelligence in the scientific community, new ideas are provided to solve many problems in flexible robot control. Intelligent control is mainly applied to relatively complex systems such as parameter uncertainty and structural uncertainty, as well as linear systems and deterministic systems with large time constants and large pure time delay. This is in line with the application of wafer handling robot, although these control methods are very complex, but there are still many scholars have done related research.
By adjusting fuzzy parameters, the control based on fuzzy theory has the self-learning ability to discard the nonlinearity and uncertainty of the system, and can estimate the feedback linearized control. Hybrid fuzzy logic controller mainly depends on its control fuzzy rules and fuzzy membership function. Pizarro [
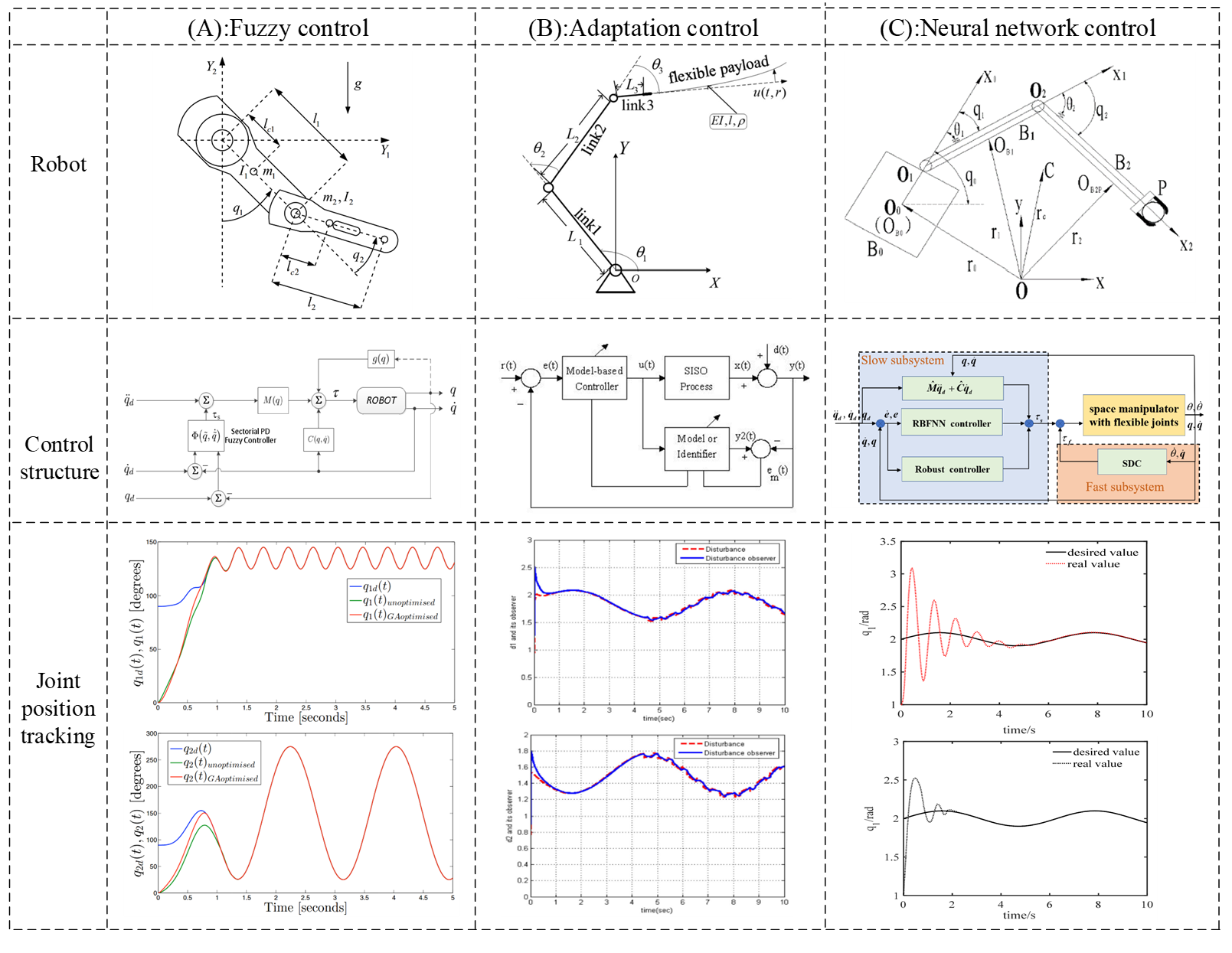
50] proposed a strategy of fine-tuning membership function using genetic algorithm to control the tracking position of robot with two joints. The effectiveness of the control strategy is proved by comparing the simulated unoptimized controller with the optimized controller using genetic algorithm, as shown in A. Fateh et al. [
51] proposed a fine-tuning fuzzy control for robots. With the help of this controller, the trajectory tracking control simulation and experiment are carried out by using the articulated electric robot manipulator. Convergence analysis can track the target path effectively and robustly. Although this method is simple in calculation, its stability is guaranteed. The simulation results show that the fine-tuning fuzzy control is superior to the PD fuzzy control in the set-point and tracking control. However, unlike adaptive fuzzy control which adapts to all rules, fine-tuning fuzzy control adapts to only one fuzzy rule.
Other adaptive control technologies can also control flexible joints, such as Trumic et al. [
52]. For the problem of joint stiffness and position synchronization control based on variable stiffness joints, based on the existing adaptive control theory, an innovative control method composed of adaptive compensator and dynamic decoupler is introduced to develop a closed-loop control technology of joint stiffness. This method does not require higher position derivatives or any stiffness derivatives. The solution has been validated in multiple use cases, and comparisons reveal more powerful position and stiffness tracking skills. Adaptive control can also carry out joint control. For example, Liu et al. [
53], This paper discusses a nonlinear direct joint control scheme, which is used to manipulate flexible payloads through single-arm systems with disturbances, parameter uncertainties and output constraints, and can avoid system overflow instability. Therefore, a new control method based on nonlinear disturbance observer is proposed to enhance its disturbance attenuation ability. In order to deal with the system parameter uncertainty, adaptive direct joint control is applied to approximate the unknown parameters, which does not need endpoint boundary control. Then, barrier Lyapunov function is used to eliminate the influence of yield restriction. Semigroup theory and invariance principle extended to infinite dimensional systems strictly prove the asymptotic stability of closed-loop systems and have good performance, as shown in B.
Neural network can solve the problem of unknown nonlinear function well. For the control problems caused by inaccurate modeling, external disturbance, joint flexibility and other uncertainties, You et al. [
54] proposed a neural network control method based on H ∞. According to the singular perturbation theory, a robust controller based on neural network is used to decouple the dynamic model of rigid body. A feedback controller based on velocity difference is designed to compensate the angle error caused by joint flexibility. Experimental simulation results verify the effectiveness of the proposed control method, which has good engineering application value, as shown in C. Rossomando Soria [
55] proposed a neural sliding mode dynamic control in discrete time domain. The weight of radial basis function can be adjusted by online adaptation law. Sliding surface can limit the adaptive law and compensate by sliding surface to eliminate the approximate error introduced by neuron controller. There is similar adaptive neural backstepping integral sliding mode control based on disturbance observer, such as Phan et al. [
56] integrating adjustable stiffness rotary actuator. The system is affected by unknown system dynamics, external disturbance and variable stiffness, so a disturbance observer is introduced to compensate for the influence of approximation errors caused by variable stiffness, disturbance and neural network. The effectiveness and feasibility of the proposed controller are proved by simulation and experiment. However, the neural sliding mode dynamic control theory has not been integrated, the parameter setting is difficult, and the application field is limited.
. Comparison of different control methods: (<b>A</b>): Fuzzy control [
50]; (<b>B</b>): Adptation control [
53]; (<b>C</b>): Neural network control [
54].
Some scholars have integrated neural network, fuzzy control, adaptive control and PID control into one method. For example, Son et al. [
57] proposed a new control system combining adaptive feedforward neural controller and PID controller, which uses actuators to control the joint angle position of robot. The inverse neural model is used to dynamically identify all the nonlinear features of the robot and the improved differential evolution algorithm is used to optimize it. Secondly, combined with an inverse neural model, the model provides applications from the desired joint position and conventional PID controllers to improve accuracy and reject steady-state errors in joint position control. Finally, a new adaptive back propagation algorithm for fuzzy systems is proposed to update the weights of the inverse neural model online, so as to better adapt to the interference and dynamic changes in its operation. Compared with the traditional control methods, the experimental results show that the proposed control scheme has better performance and advantages, but the control algorithm is very complex and there is room for simplified application.
3.3. Discission
High safety, high stability and high reliability are three important factors for the development of high-performance robots in the future [
58]. Under the background of high requirements of human-computer interaction, designing a better control method with variable stiffness and flexibility of robots can achieve the balance between speed, accuracy and vibration suppression during the movement of wafer transfer robots. The existing methods have their own advantages and disadvantages:
Trajectory planning optimization: Considering the flexible transmission mode of wafer handling robot, it is necessary to combine the flexible dynamic model for trajectory planning. Fifth-order polynomial interpolation and S-curve programming significantly improve the smoothness of motion, but the residual vibration of flexible joints still needs to rely on feedback control compensation. The dynamic zero vibration shaper has remarkable effect at fixed frequency, but its adaptability to time-varying stiffness is insufficient, so it needs to be combined with on-line adjustment mechanism in practical application.
Control algorithm: The existing flexible joints with variable stiffness of robots still have some problems in joint structure, variable stiffness range, dynamic stiffness identification and control methods. Decoupling servo control simplifies the control structure through inner loop decoupling, and has verified high tracking accuracy in robots, but there are still steady-state errors in systems with strong nonlinear coupling and sensitive time-varying parameters. Intelligent algorithms (such as neural network and fuzzy control) are outstanding in dealing with nonlinearity and uncertainty, but their computational complexity is high, which makes it difficult to meet the requirements of microsecond real-time control. For example, although the adaptive fuzzy-PID hybrid controller has improved robustness, the industrial deployment cost has increased sharply. Feedforward compensation and ADRC pre-compensate the vibration through the dynamic model, which significantly reduces the tracking error, but requires extremely high model accuracy and requires frequent calibration in practical applications.
Industrial application feasibility: Existing intelligent algorithms mostly stay in the simulation stage, and industrial scenarios prefer feedforward-feedback composite control based on physical models. In the future, it is necessary to develop lightweight AI controllers supported by edge computing, and combine digital twins to realize online model updates to take into account accuracy and real-time performance, which is difficult to apply in practice.
4. Vibration Suppression Technology of Wafer Handling Robot
In order to meet the new standards of wafer production and processing, besides vibration suppression by modeling and control, the research on vibration suppression of wafer handling robot must also open up a new world. Usually, the vibration suppression of flexible joint robot mainly includes structural optimization design and vibration absorber. In order to suppress vibration, we can construct the dynamic model of wafer processing robot, and then analyze the dynamic characteristics of the robot to find out the main parameters that affect the natural frequency. Considering the workspace and structure of the robot, the constraint function is obtained. The wafer handling robot can be optimized, which provides a reference for the vibration suppression technology of wafer handling robot.
4.1. Optimize the Structure to Suppress Vibration
In the aspect of structural optimization, Wu et al. [
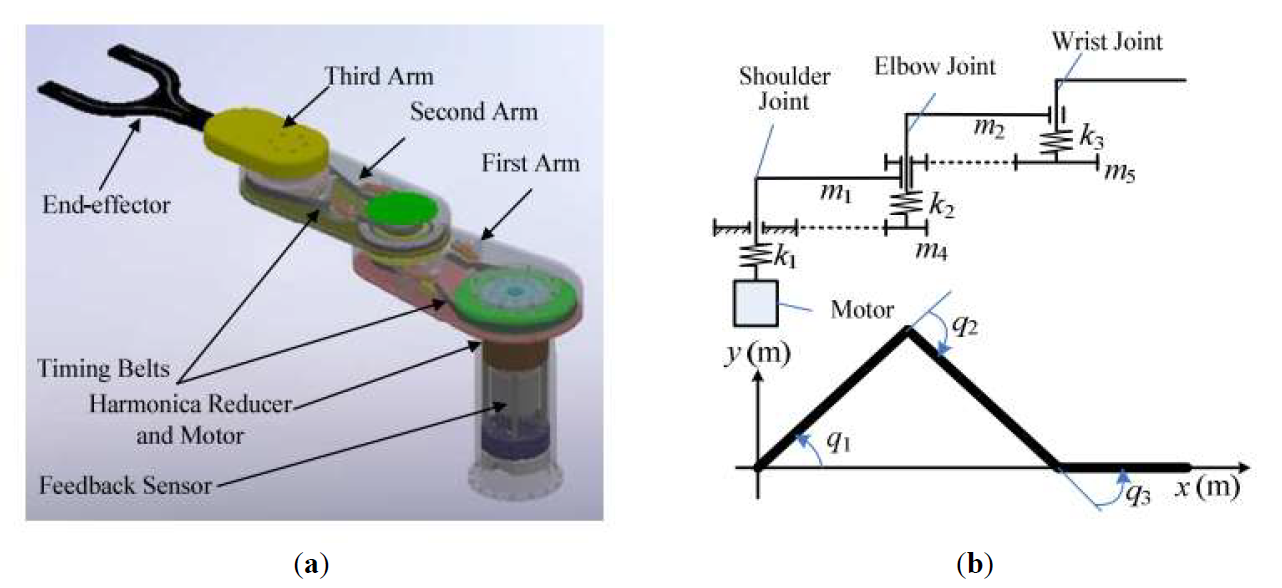
59] proposed a structural optimization design method of silicon wafer transmission robot arm, which takes static offset as constraint, natural frequency of system as optimization objective and wall thickness of each arm as optimization parameter. The results show that this method can greatly reduce the mass of the arm and increase the first and second natural frequencies of the wafer transfer robot arm, greatly reduce the static offset and internal stress at the end, and greatly increase the vibration frequency of the system, as shown in .
. Typical Structure Diagram (<b>a</b>) and Simplified Mathematical Model (<b>b</b>) of Wafer Handling Robot [
59].
From the aspect of external structure, Matteo et al. [
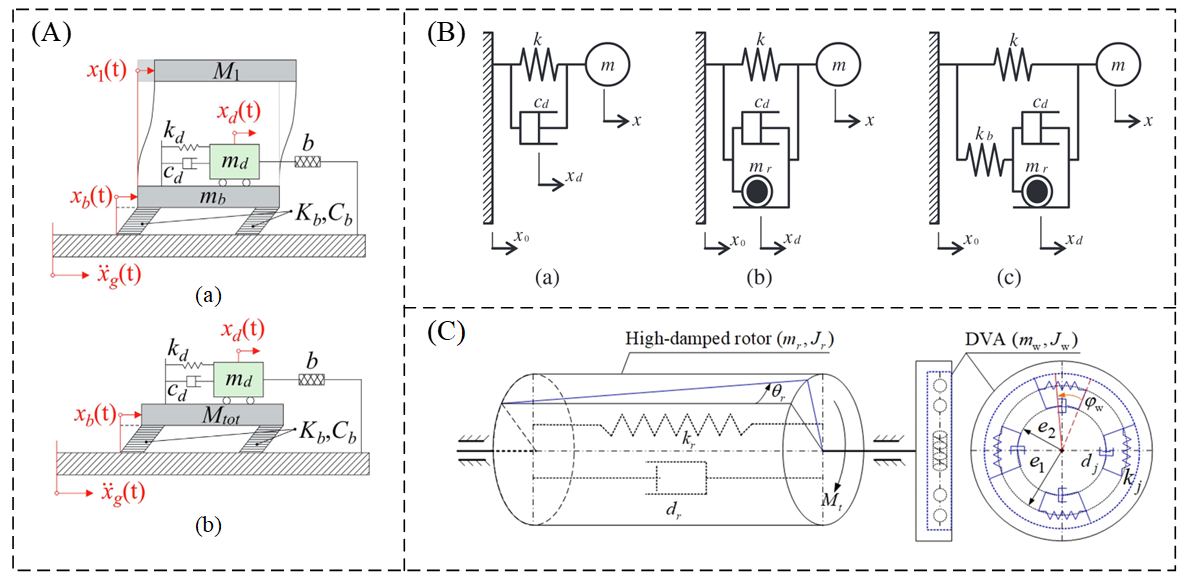
60] put forward a dynamic vibration absorber design method combining numerical calculation and analytical analysis and optimizing the parameters of base-isolated structures, as shown in A. The inertia of tuned mass damper is used to control the response of isolated structures, and the steady-state base excitation of white noise and color noise is considered at the same time, which effectively reduces the response of base-isolated structures. The reliability and efficiency of the proposed method are proved.
4.2. Vibration Absorber Suppresses Vibration
Dynamic vibration absorber is composed of damper, spring and mass, which is one of the common vibration suppression methods and has been widely used in the field of vibration suppression. Because the traditional dynamic vibration absorber system mostly faces the fixed frequency vibration suppression situation, the vibration reduction frequency range is relatively narrow. Therefore, the urgent problem to be solved for dynamic vibration absorber is to broaden the frequency range on the basis of ensuring vibration suppression performance; Because the classical dynamic vibration absorber system has a relatively narrow range of vibration reduction and needs a larger mass to provide better performance, it is sometimes difficult to achieve in practice, so the traditional method has reached the limit.
4.2.1. Fixed Stiffness Dynamic Vibration Absorber
Based on the above vibration absorber model, scholars have done a lot of research. Ikago et al. [
61] proposed and optimized a new inertia-based vibration control configuration, called tunable viscous mass damper, and showed that it can control the vibration response of building vibration system with a small mass, as shown in B Using the apparent mass amplifier of ball screw mechanism, the closed-form solution of the optimal seismic control design of single-degree-of-freedom structure excited by harmonics is also derived. The performance of the new equipment is compared with that of the traditional viscous damper and viscous mass damper system, and the effectiveness is verified. Zeng et al. [
62] combines the advantages of quasi-zero stiffness isolator, nonlinear energy absorber and inertia device, and proposes a new vibration control scheme for suspension system. It can achieve low transmissibility, low amplitude and low additional weight, and improve the comfort and handling stability of the system. This paper provides a theoretical basis for integrating quasi-zero stiffness vibration isolator and internal inertia nonlinear energy absorber to improve comfort and handling stability.
. Schematic Diagram of Various Basic Vibration Absorbers. (<b>A</b>): Simplified models (<b>a</b>) A SDOF base-isolated TMDI-controlled shear-type frame; (<b>b</b>) Base isolated rigid structure equipped with TMDI [
60]; (<b>B</b>) Analysis models. (<b>a</b>) Viscous damper (<b>b</b>) Viscous mass damper (<b>c</b>) Tuned viscous mass damperTVMD [
61]; (<b>C</b>) Modelling for a high-damped rotor attached dynamic vibration absorber [
62].
Torsional vibration of the damping rotor usually occurs in the wafer handling system, which leads to the imbalance of the wafer handling system. Recent research shows that traditional methods are suitable for reducing torsional vibration of weakly damped rotors. However, traditional methods will cause great errors to high damping rotors. Therefore, Phuc et al. [
63] proposed a new method for suppressing torsional vibration of highly damped rotor by dynamic shock absorber based on weighted dual estimation of equivalent linearization technique, as shown in C. The highly damped rotor is approximately replaced by the equivalent undamped rotor based on the weighted dual estimation of the equivalent linearization technique. In order to suppress the torsional vibration of the rotor with high damping, two closed-form expressions of the appropriate spring and viscous damper system for the optimal vibration absorber are determined. The numerical results show that the torsional vibration of the rotor with high damping is obviously reduced in the resonant frequency region.
4.2.2. Dynamic Power Vibration Absorber
The above dynamic vibration absorbers are all based on the vibration suppression scenario facing fixed stiffness. When the deviation between the excitation frequency and the natural frequency of the vibration absorber is large, the vibration absorption effect will decrease rapidly. Therefore, the dynamic power vibration absorber with variable stiffness has gradually become a research hotspot, and the variable stiffness also belongs to the motion characteristics of wafer handling robot. The nonlinear variation of the vibration at the end can have room for application.
A major limitation of the passive dynamic absorber is its inherent design limitation, since it is tuned to a specific resonant frequency [
64], which makes it less effective in mitigating vibration in the variable frequency range. Many scholars have done a lot of research on this problem. For example, Wang et al. [
65] proposed a new dynamic shock absorber based on inertia and negative stiffness based on the relationship between inertia dynamic shock absorber and negative stiffness dynamic shock absorber in structural vibration reduction, and proved that the effective frequency bandwidth is wider than the existing dynamic shock absorber, and it performs best under harmonic and random excitation. Xiao et al. [
66] presents several novel inert dynamic vibration absorbers by matching inert bodies with dynamic vibration absorbers at different positions, and proposes a new type of inertial dynamic vibration absorber to improve the performance of passive dynamic vibration absorbers. The optimization results show that this method can provide better system performance.
In addition to passive dynamic vibration absorbers, there are also studies on adaptive active vibration absorbers. For example, Silva et al. [
67] found that the hysteresis dissipation characteristics and temperature dependence characteristics of shape memory alloy bearings can be applied to rotor systems to realize adaptive active vibration control, and proved that it can effectively avoid vibration in dynamic response due to nonlinear effects. In order to ensure that the dynamic vibration absorber keeps its vibration reduction ability under time-varying frequency load, Li et al. [
68] changes the stiffness of the dynamic vibration absorber through semi-active or active control to achieve the best vibration reduction performance. In nonlinear control, different from passive dynamic vibration absorber, nonlinear can further reduce elastic vibration in a specific speed range. Nonlinear frequency control can provide reference for structural vibration control under time-varying frequency load.
Because the previous research on dynamic power vibration absorber has achieved good results, and it can meet the vibration absorption requirements of wafer handling robots, some scholars have applied it to wafer handling robots, such as Wang et al. [
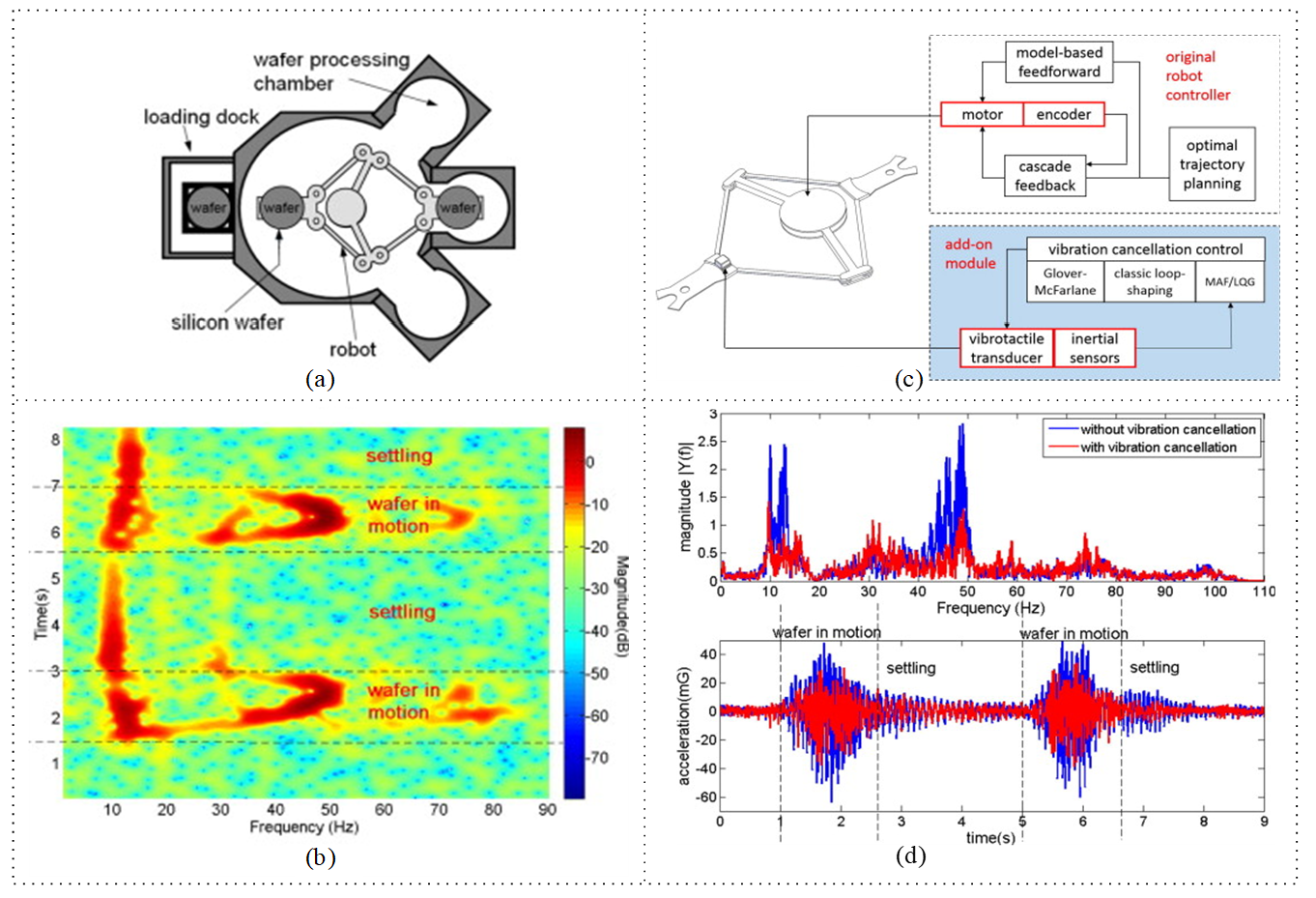
69] and others have proposed a direct vibration elimination method for semiconductor manufacturing robots. By mounting a vibration tactile sensor on the wafer holder, the vibration can be significantly reduced without adversely affecting the tracking accuracy of the wafer processing movement. The system is shown in .
. Vibration Elimination System: (<b>a</b>) Wafer Handling Robot; (<b>b</b>) Vibration in Wafer Processing; (<b>c</b>) Vibration Absorption System Steel Structure; (<b>d</b>) Vibration Absorption Experiment Results [
69].
In view of various problems existing in the traditional dynamic vibration absorber, many scholars have improved on the original basis, and studied by changing the form of damper: Hu et al. [
70] proposed a two-degree-of-freedom dynamic vibration absorber based on shape memory alloy, in which the spring and inertia-based mechanical network are arranged in parallel, which is an inertia-based dynamic vibration absorber. The resonance response of the rotor is controlled by adjusting the stiffness of the shape memory alloy bias spring, and the direct search optimization method is used to solve it; Analytical method is used to calculate performance measures. In contrast to conventional absorbers, as shown in Figure18A, numerical parameter optimization results show that the addition of inertia absorbers can simultaneously widen the damping range and reduce the resonance amplitude, thus improving the system performance.
By installing other systems to improve new energy, Marcial et al. [
71] proposed a new type of grounded damping dynamic shock absorber based on stiffness, and derived the analytical design parameters in detail. The schematic diagram is shown in B. The optimal stiffness ratio, the optimal damping ratio and the optimal grounding stiffness ratio are expressed as functions of mass ratio and lever ratio by establishing the mean square displacement response of the primary structure. The results show that, compared with some typical dynamic absorbers designed under harmonic and random excitation, the resonant amplitude and damping frequency band can be greatly reduced and widened, respectively, and the random vibration mitigation can be greatly improved by using the optimal dynamic absorber.
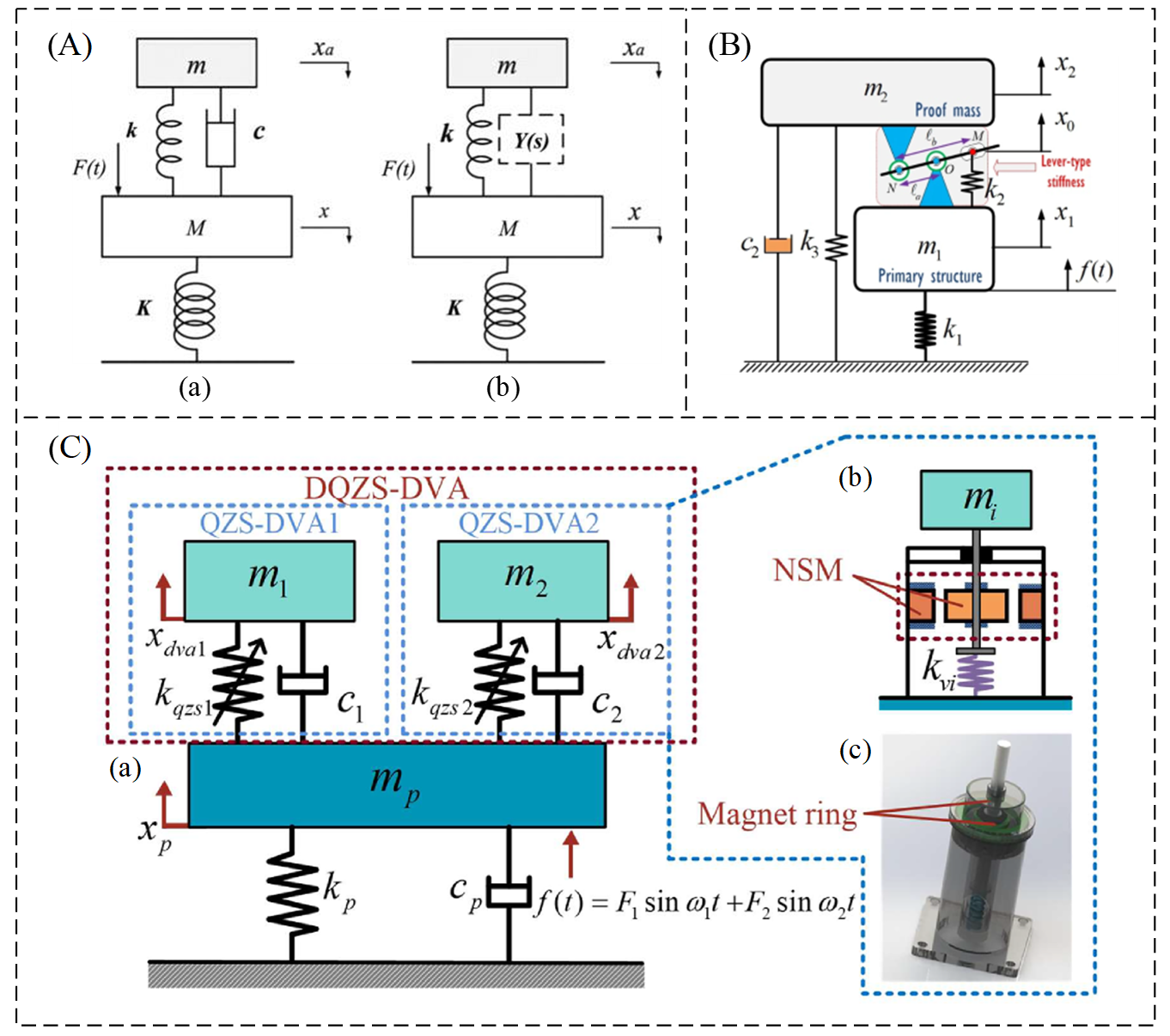
Compared with two-stage linear vibration isolator, two-stage quasi-zero stiffness system has excellent vibration isolation performance, which makes it a promising candidate for vibration isolation of precision instruments. Because of its low dynamic stiffness, two-stage quasi-zero stiffness system shows obvious vibration amplitude. Xing et al. [
72] proposed a coupling system, which consists of a two-stage quasi-zero stiffness system and a dynamic shock absorber connected to the upper part of the two-stage quasi-zero stiffness system. The approximate analytical solution is obtained by harmonic balance method. The influence of system parameters on dynamic behavior and isolation performance is studied in detail. The results show that the integration of dynamic shock absorbers can effectively reduce the vibration amplitude and expand the isolation frequency band without affecting the high frequency performance. Tian et al. [
73] researched and developed a new type of dynamic shock absorber. Static analysis verified the effectiveness of the new type of dynamic shock absorber in preventing the interaction between driving torque and mass stroke, and weakened the influence of driving torque on mass stroke.
. Modification schematic diagram of different dynamic vibration absorbers (<b>A</b>): dynamic vibration absorber (<b>a</b>) traditional dynamic vibration absorber; (<b>b</b>) Interference-based dynamic vibration absorbers [
70]; (<b>B</b>): Adding system to improve dynamic vibration absorber model [
71]; (<b>C</b>): Schematic diagram of c dual-frequency dynamic vibration absorption (<b>a</b>) mass spring model (<b>b</b>) simplified vibration absorber model (<b>c</b>) physical vibration absorber model [
74].
In general, the dynamic shock absorber is effective in suppressing single-frequency vibration, but ineffective in suppressing double-frequency vibration. Li et al. [
74] designed a negative stiffness dynamic vibration absorber based on a pair of mutually exclusive permanent magnets for dual-frequency vibration. The schematic diagram is shown in C. Theoretical and numerical analysis shows that the anti-resonant frequency can further improve the vibration suppression performance. Huang et al. [
75] proposed a bistable dynamic shock absorber with active adjustable stiffness. Taking continuous harmonic vibration as input energy, the energy conversion and target energy transfer performance of the fusion system are evaluated theoretically. This integrated energy conversion and vibration control strategy is a potential alternative to intelligent structural health monitoring and sound broadband vibration control for state-of-the-art manufacturing equipment under multi-source vibration interference.
4.3. Discussion
The main problem faced by vibration suppression technology is the need to balance between structural design, vibration absorber performance and cost. The existing solutions have their own advantages and disadvantages:
Structural optimization (such as arm thickness lightweighting): Resonance risk is reduced by increasing system stiffness, but excessive lightweighting may sacrifice mechanical strength, and manufacturing process limitations (such as ultra-thin end effector machining) lead to sharp cost increases. The tuned mass damper of is effective in narrow frequency band, but its adaptability to broadband vibration of wafer robot is limited.
Dynamic vibration absorber: Fixed stiffness vibration absorber (such as viscous mass damper) is simple in structure and low in cost, but has a narrow frequency band and is only suitable for steady-state working conditions. Facing the instantaneous characteristics of silicon wafer conveying robot, it is necessary to deeply study the structure and control system bandwidth of active variable stiffness dynamic vibration absorber. Variable stiffness vibration absorbers (negative stiffness design) broaden the effective frequency band through active adjustment, but rely on complex driving mechanisms (such as shape memory alloys), and their reliability and durability need to be verified urgently. The inertial vibration absorber improves the damping range through parallel mechanical network, but the mass increase may affect the dynamic performance of the robot.
Industrial application feasibility: Structural optimization is limited by manufacturing costs, while dynamic vibration absorbers are easier to integrate into existing systems through modular design. Semi-active control combined with multi-objective optimization algorithm is expected to achieve a balance between broadband vibration suppression and cost, but it needs to solve the problems of control delay and energy consumption.
5. Other Robot Technology Research
In addition to studying the wafer handling robot ontology to improve various performances on the ontology to improve productivity, running speed and handling quality, many scholars have achieved this goal from other aspects, such as detecting the running status of equipment, cooperating with multiple robots, optimizing wafer delay and so on.
5.1. Robot Error Prediction
Maintenance is a technology that continuously monitors the condition of equipment and predicts the maintenance time of equipment. Especially in the field of process automation semiconductor manufacturing, people are trying various methods, such as analyzing data to predict the possible errors of wafer handling robots, so as to minimize equipment failures and minimize economic losses caused by equipment failures or huge maintenance costs.
Once the wafer is damaged, it will produce great economic losses, so it is extremely important to ensure the precision maintenance and service life prediction of the wafer handling robot in its service life. Jeon et al. [
76] proposed a new predictive maintenance method to predict the error of wafer transfer robot, and classified the significance level of the error. The acceleration sensor is used to collect the experimental data of wafer transfer robot. The proposed method can detect errors and accurately classify error levels in the mixed data of normal data and erroneous data. JiHyun et al. [
77] This paper introduces a new predictive maintenance technology and a new maintenance method to develop an algorithm for predicting the failure of wafer transfer robot in advance. By using K-means algorithm to cluster data, the distribution of cluster center points is analyzed, and the features of error data and normal data are extracted. Using these functions, an artificial neural network model is designed to predict the fault points of the robot, and the neural network modeling is applied to predict the equipment faults.
5.2. Robot Cluster Control
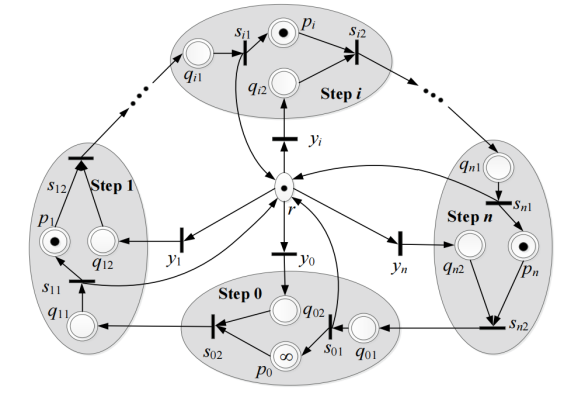
Nowadays, wafer manufacturing in semiconductor manufacturing is highly dependent on cluster tools, and long wafer delay time may reduce its quality and have a negative impact. Therefore, in order to ensure wafer quality, it is very desirable and important to minimize the wafer delay time of each step after wafer processing. Wen [
78,
79] cluster tool is equipped with multiple process modules and a wafer processing robot, as shown in . This work aims to solve this important problem of single-arm cluster tools. There must be wafer delay time in the upstream step of bottleneck step. Based on Petri net model, this wafer delay time can be reduced by properly adjusting the waiting time of robot. Therefore, a method of robot waiting time control is proposed, which can reduce wafer delay as much as possible by properly adjusting the idle time of robot. Dong et al. [
80] In order to prevent excessive wafer delay and its variability of single-arm and dual-arm cluster tools, we propose a simple, effective and robust feedback control method called Kanban feedback control, which models the feedback control design problem as the problem of adding feedback path between a pair of transformations to adjust the delay at a certain position in the timed event diagram model. It is verified that Kanban feedback control significantly reduces wafer delay and robustly adjusts wafer delay and even cycle time for continuous time changes and significant sporadic time interruptions.
. Block Diagram of Delayed Cluster Control System [
79].
Digital twinning technology can monitor the motion of wafer handling robot in real time, which is beneficial to realize real-time control. For example, Chou et al. [
81] In this study, field programmable gate array technology is used to realize the motion controller of wafer handling robot with three degrees of freedom. The full digital motion control of wafer handling robot is realized. Coman et al. [
82] develop control and programming applications for robots specially designed for wafer operation, and integrate them with mobile devices capable of wireless communication. Then, the mobile device is used to command axis movement, internal signals and programming. The application is developed as a user interface capable of communicating with the robot controller and converting user input into controller commands. This research is of great significance in the field of industrial wireless communication, and it is a step towards more flexible robot application, fully integrated remote operation technology and easier access to remote production facilities.
5.4. Discussion
Emerging technologies provide new ideas for improving the performance of wafer transfer robots. Although the above technologies are not mature enough, they are also promoting the continuous improvement of the automation degree of wafer handling robots in semiconductor equipment and becoming more intelligent and integrated. Direction development:
Predictive maintenance (such as cluster analysis) uses vibration data to warn faults early, but the cost of sensor deployment and data labeling is high, and small sample failure pattern identification is still difficult. Cluster control (such as robot idle time regulation) reduces wafer delay through scheduling algorithms, but the problems of conflict avoidance and communication delay in multi-robot collaboration have not been completely solved. Digital twins (such as FPGA controllers) realize full digitization of motion, but high-fidelity model construction relies on multi-physics simulation and real-time data synchronization, which requires extremely high computing power.
Industrial feasibility and application: Industrial Internet of Things (IIoT) and 5G communications provide infrastructure support for the implementation of the above technologies, but standardized interface protocols need to be developed to reduce integration complexity. In the future, we can explore a distributed predictive maintenance framework based on federated learning, combined with edge-cloud collaborative computing, to improve system response speed and reliability.
6. Summary and Outlook
6.1. Summary
This paper systematically combs the research progress of wafer handling robot in the field of vibration control, focusing on the joint stiffness identification, motion control and vibration suppression technology of wafer handling robot, and draws the following main conclusions:
- (1)
-
Dynamic identification of joint stiffness: The existing research has realized the identification of joint stiffness through equivalent flexible joints (such as two-mass system) and dynamic observer (such as residual method, etc.), but it is still faced with the problem of insufficient prediction accuracy of instantaneous stiffness change. The dynamic coupling of time-varying stress and load driven by steel belt leads to significant nonlinearity of stiffness model, which needs to be combined with hybrid modeling to make the motion mechanism clearer and optimize the parameter identification efficiency, and provide a better foundation for the research of control system and vibration suppression system.
- (2)
-
Optimization of motion trajectory: By optimizing the path planning algorithm and control algorithm, the manipulator can find the optimal motion path, thus shortening the motion time. Fifth-order polynomial interpolation, S-curve programming and other methods improve the motion smoothness, but the residual vibration suppression of flexible joints still needs to be combined with real-time feedback control (such as singular perturbation theory, feedforward compensation, etc.).
- (3)
-
Optimization of control strategy: Different control methods have different characteristics. By studying various feedback and feedforward control of the robot, the high efficiency and stability of the wafer handling robot are guaranteed to a certain extent. For example, improved PID (such as decoupled servo control), adaptive control and intelligent algorithms (neural network, fuzzy logic) have shown potential in complex nonlinear systems, but high computational complexity limits practical applications. Some studies have significantly improved tracking accuracy through the fusion of visual servo and dynamic models (such as attitude-dependent feedforward control), but model uncertainty is still the main challenge.
- (4)
-
Innovation of vibration suppression technology: The lightweight design of the structure and the increase of natural frequency can enhance the rigidity of the system, but it is limited by the manufacturing process and economic cost. Fixed stiffness vibration absorbers have remarkable effects in the home frequency band, while variable stiffness vibration absorbers (such as negative stiffness design, etc.) broaden the frequency band adaptability, but their driving bandwidth and real-time adjustment capabilities still need to be improved.
6.2. Outlook
The existing wafer handling robot technology is not mature enough, and the research enthusiasm needs to be increased. The combination of stiffness identification and control technology and artificial intelligence related technologies is not deep enough, and there is a lot of room for development. Based on existing research, identify the following key gaps and development directions:
- (1)
-
Real-time and accuracy of dynamic stiffness identification: This method relies on off-line calibration or simplified models, and it is difficult to cope with the complex dynamics of transient load changes driven by steel belts. In the future, not only structural optimization is needed, but also the development of a hybrid identification framework based on embedded sensors, combining physical models with real-time data drive, to improve the robustness of dynamic stiffness prediction.
- (2)
-
Bottlenecks in the practical application of robot control algorithms: Although intelligent algorithms (such as reinforcement learning) can deal with nonlinear problems, they rely on a large amount of training data to take a long time and consume high computing resources. It is necessary to explore lightweight models (such as edge computing segment deployment, etc.) and physics. Deep integration of models to achieve high-precision and low-latency control.
- (3)
-
Broad adaptability of vibration suppression system: Existing vibration absorbers have limited performance in broadband vibration suppression, especially in the face of time-varying frequency excitation of wafer handling robots. In the future, semi-active control (such as magnetorheological damping) and multi-objective optimization algorithms can be combined to design an adaptive variable stiffness vibration absorption system to achieve full working condition coverage.
- (4)
-
System integration and intelligent upgrade: Current research focuses on a single technology, lacking collaborative optimization of stiffness identification, control and vibration suppression. It is recommended to build a digital twin platform to achieve global performance optimization through multi-physics coupling simulation and real-time data intersection. In addition, the combination of Industrial Internet of Things (IIoT) and predictive maintenance technologies (such as fault clustering analysis, etc.) can further improve system reliability and lifespan.
In summary, the high precision, rapid speed, and advanced intelligence of wafer transfer robots represent an inevitable trend in the evolution of semiconductor manufacturing equipment. Recent research has achieved notable advancements in joint stiffness identification, motion control, and vibration suppression; however, the industrial feasibility of these innovations continues to pose a significant challenge. Future research must endeavor to overcome the technical barriers associated with dynamic modeling, real-time control, and adaptive vibration suppression, while also fostering the deep integration of hybrid drive architectures, AI-embedded algorithms, and novel materials. Through interdisciplinary collaboration and rigorous engineering verification, the ultra-precision and highly reliable operation of the wafer transfer system under complex working conditions can ultimately be achieved, significantly enhancing production efficiency and providing essential support for the technological advancement of the semiconductor industry.
Author Contributions
Conceptualization, L.Z. and J.Z.; Methodology, H.J. and Y.Z.; Software, H.J. and Y.Z.; Validation, H.J., J.Z. and C.L.; Formal Analysis, J.Z.; Investigation, H.J., Y.Z. and J.Z.; Resources, Y.Z. and J.Z.; Data Curation, H.J. and Y.Z.; Writing—Original Draft Preparation, H.J. and Y.Z.; Writing—Review & Editing, L.Z.; Visualization, J.Z.; Supervision, L.Z.; Project Administration, L.Z.; Funding Acquisition, L.Z.
Ethics Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data availability is not applicable to this article as no new data were created or analyzed in this study.
Funding
This research was funded by the National Natural Science Foundation of China 51352375412 and Fundamental Research Funds for Central Universities [N2203011].
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
1.
Kaihara T, Kurose S, Fujii N. A Proposal on Optimized Scheduling Methodology and Its Application to an Actual-Scale Semiconductor Manufacturing Problem.
CIRP Ann. 2012,
61, 467–470.
[Google Scholar]
2.
Pham QC. A General, Fast, and Robust Implementation of the Time-Optimal Path Parameterization Algorithm.
IEEE Trans. Robot. 2014,
30, 1533–1540.
[Google Scholar]
3.
Aydin M, Gulec M. A New Coreless Axial Flux Interior Permanent Magnet Synchronous Motor with Sinusoidal Rotor Segments.
IEEE Trans. Magn. 2016,
52, 1–4.
[Google Scholar]
4.
Menard T, Grioli G, Bicchi A. A Real Time Robust Observer for an Agonist-Antagonist Variable Stiffness Actuator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3988–3993.
5.
Flacco F, De Luca A, Sardellitti I, Tsagarakis NG. On-Line Estimation of Variable Stiffness in Flexible Robot Joints.
Int. J. Robot. Res. 2012,
31, 1556–1577.
[Google Scholar]
6.
Cheng H, Chen H, Mooring BW. Accuracy Analysis of Dynamic-Wafer-Handling Robotic System in Semiconductor Manufacturing.
IEEE Trans. Ind. Electron. 2014,
61, 1402–1410.
[Google Scholar]
7.
İlman MM, Yavuz Ş, Taser PY. Generalized Input Preshaping Vibration Control Approach for Multi-Link Flexible Manipulators Using Machine Intelligence.
Mechatronics 2022,
82, 102735.
[Google Scholar]
8.
Zhang K, Wang L, Fang X. Robust Decoupled Synchronization Control of Dual-motor Servo Systems by Mechanical Parameter Identification.
IET Power Electron. 2022,
15, 1490–1501.
[Google Scholar]
9.
Kim C, Lee TE. Feedback Control of Cluster Tools for Regulating Wafer Delays.
IEEE Trans. Autom. Sci. Eng. 2016,
13, 1189–1199.
[Google Scholar]
10.
Medjebouri A, Mehennaoui L. Active Disturbance Rejection Control of a SCARA Robot Arm.
Int. J. U- E-Serv. Sci. Technol. 2015,
8, 435–446.
[Google Scholar]
11.
Aljohani AJ, Mehedi IM, Bilal M, Mahmoud M, Meem RJ, Iskanderani AIM, et al. Rotary Flexible Joint Control Using Adaptive Fuzzy Sliding Mode Scheme.
Comput. Intell. Neurosci. 2022,
2022, 2613075.
[Google Scholar]
12.
Zeng Y, Ding H, Du RH, Chen LQ. A Suspension System with Quasi-Zero Stiffness Characteristics and Inerter Nonlinear Energy Sink.
J. Vib. Control. 2022,
28, 143–158.
[Google Scholar]
13.
Choi J, Hong S, Lee W, Kang S, Kim M. A Robot Joint with Variable Stiffness Using Leaf Springs.
IEEE Trans. Robot. 2011,
27, 229–238.
[Google Scholar]
14.
Yoshioka H, Shinno H, Sawano H, Department of Mechanical and Control Engineering, Tokyo Institute of Technology, Precision and Intelligence Laboratory, et al. A Low-Profile Planar Motion Table System Driven by Steel Belt.
Int. J. Autom. Technol. 2015,
9, 739–745.
[Google Scholar]
15.
Paryanto Brossog M, Kohl J, Merhof J, Spreng S, Franke J. Energy Consumption and Dynamic Behavior Analysis of a Six-Axis Industrial Robot in an Assembly System.
Procedia CIRP. 2014,
23, 131–136.
[Google Scholar]
16.
Cong M, Wen H, Du Y, Dai P. Coaxial Twin-Shaft Magnetic Fluid Seals Applied in Vacuum Wafer-Handling Robot.
Chin. J. Mech. Eng. 2012,
25, 706–714.
[Google Scholar]
17.
Chen H, Cheng H, Moorings B, Stern H. Eccentricity Estimation with Error Modeling in Dynamic Wafer Handling.
Int. J. Adv. Manuf. Technol. 2013,
68, 425–433.
[Google Scholar]
18.
Chou CH, Duan M, Okwudire CE. A Linear Hybrid Model for Enhanced Servo Error Pre-Compensation of Feed Drives with Unmodeled Nonlinear Dynamics.
CIRP Ann. 2021,
70, 301–304.
[Google Scholar]
19.
Yue W, Liu H, Li G, Xu K. Approach for Identifying Cartesian Stiffness of a 5-Degree-of-Freedom Hybrid Robot for Machining.
J. Mech. Robot. 2024,
16, 031009.
[Google Scholar]
20.
Wu Y. Control Force Compensation and Wear Monitoring of Variable Stiffness Joints in Drive Machining Process.
Math. Probl. Eng. 2021,
2021, 5524323.
[Google Scholar]
21.
Menard T, Grioli G, Bicchi A. A Stiffness Estimator for Agonistic–Antagonistic Variable-Stiffness-Actuator Devices.
IEEE Trans. Robot. 2014,
30, 1269–1278.
[Google Scholar]
22.
Meng X, Guo W, Wang X, Li M, Zha F, Wang P. Estimation of Variable Stiffness in Flexible Robot Based on Information Assimilation. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei and Taian, China, 27–31 August 2017.
23.
Chakarov D, Tsveov M, Veneva I, Mitrouchev P. Adjustable Compliance Joint with Torsion Spring for Human Centred Robots.
Int. J. Adv. Robot. Syst. 2015,
12, 180.
[Google Scholar]
24.
Serio A, Grioli G, Sardellitti I, Tsagarakis NG, Bicchi A. A Decoupled Impedance Observer for a Variable Stiffness Robot. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5548–5553.
25.
Flacco F, De Luca A. Residual-Based Stiffness Estimation in Robots with Flexible Transmissions. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5541–5547.
26.
Flacco F, De Luca A, Sardellitti I, Tsagarakis NG. Robust Estimation of Variable Stiffness in Flexible Joints. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4026–4033.
27.
Lin X, Peng C, Yin Y. A Real-Time Variable Stiffness Measuring Method Consisted of Residual-Based Estimator and Parametric Observer.
Procedia CIRP. 2019,
83, 773–778.
[Google Scholar]
28.
Lee J, Lee C, Tsagarakis N, Oh S. Residual-Based External Torque Estimation in Series Elastic Actuators Over a Wide Stiffness Range: Frequency Domain Approach.
IEEE Robot. Autom. Lett. 2018,
3, 1442–1449.
[Google Scholar]
29.
Chen CS, Chen SK, Chen LY. Disturbance Observer-Based Modeling and Parameter Identification for Synchronous Dual-Drive Ball Screw Gantry Stage.
IEEEASME Trans. Mechatron. 2019,
24, 2839–2849.
[Google Scholar]
30.
Fagiolini A, Trumic M, Jovanovic K. An Input Observer-Based Stiffness Estimation Approach for Flexible Robot Joints.
IEEE Robot. Autom. Lett. 2020,
5, 1843–1850.
[Google Scholar]
31.
Jafari A, Tsagarakis NG, Sardellitti I, Caldwell DG. A New Actuator with Adjustable Stiffness Based on a Variable Ratio Lever Mechanism.
IEEEASME Trans. Mechatron. 2014,
19, 55–63.
[Google Scholar]
32.
He Y, Chen J, Gao J, Cui C, Yang Z, Chen X, et al. Research on Motion Simulation of Wafer Handling Robot Based on SCARA. In Proceedings of the 2018 19th International Conference on Electronic Packaging Technology (ICEPT), Shanghai, China, 8–11 August 2018; pp. 734–739.
33.
Kim J, Croft EA. Online near Time-Optimal Trajectory Planning for Industrial Robots.
Robot. Comput. -Integr. Manuf. 2019,
58, 158–171.
[Google Scholar]
34.
Wang Z, Yan Z. Three-Stage Tracking Control for the LED Wafer Transporting Robot.
Math. Probl. Eng. 2015,
2015, 365206.
[Google Scholar]
35.
Kim J, Croft AE. Preshaping Input Trajectories of Industrial Robots for Vibration Suppression.
Robot. Comput. -Integr. Manuf. 2018,
54, 35–44.
[Google Scholar]
36.
Kim J, Croft AE. Full-State Tracking Control for Flexible Joint Robots with Singular Perturbation Techniques.
IEEE Trans. Control. Syst. Technol. 2019,
27, 63–73.
[Google Scholar]
37.
Han BY, Zhao B, Sun RH. Research on Motion Control and Wafer-Centering Algorithm of Wafer-Handling Robot in Semiconductor Manufacturing.
Sensors. 2023,
23, 8502.
[Google Scholar]
38.
He Y, Mai X, Cui C, Gao J, Yang Z, Zhang K, et al. Dynamic Modeling, Simulation, and Experimental Verification of a Wafer Handling SCARA Robot with Decoupling Servo Control.
IEEE Access. 2019,
7, 47143–47153.
[Google Scholar]
39.
Chen X, Zhao C, Chen J, Zhang D, Zhu K, Su Y. A Compact Robot-Based Defect Detection Device Design for Silicon Wafer.
J. Phys. Conf. Ser. 2020,
1449, 012111.
[Google Scholar]
40.
He Y, Zhang C, Ye W, He Z, Chen X, Gao J, et al. A Direct-Drive SCARA Robot for Wafer & ceramic-Substrate Handling Based on Visual Servoing. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 428–433.
41.
Javadi A, Chaichaowarat R. Position and Stiffness Control of an Antagonistic Variable Stiffness Actuator with Input Delay Using Super-Twisting Sliding Mode Control.
Nonlinear Dyn. 2023,
111, 5359–5381.
[Google Scholar]
42.
Roozing W, Li Z, Medrano-Cerda GA, Caldwell DG, Tsagarakis NG. Development and Control of a Compliant Asymmetric Antagonistic Actuator for Energy Efficient Mobility.
IEEEASME Trans. Mechatron. 2016,
21, 1080–1091.
[Google Scholar]
43.
Chou CH, Qian C, Lin YC, Awtar S, Okwudire CE. Feedforward Compensation of the Pose-Dependent Vibration of a Silicon Wafer Handling Robot.
CIRP Ann. 2024,
73, 321–324.
[Google Scholar]
44.
Yu X, Wang C, Zhao Y, Tomizuka M. Controller Design and Optimal Tuning of a Wafer Handling Robot. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 640–646.
45.
Guo J, Tian G. Mechanical Design and Robust Tracking Control of a Class of Antagonistic Variable Stiffness Actuators Based on the Equivalent Nonlinear Torsion Springs.
Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2018,
232, 1337–1355.
[Google Scholar]
46.
Guo J, Guo J, Xiao Z. Robust Tracking Control for Two Classes of Variable Stiffness Actuators Based on Linear Extended State Observer with Estimation Error Compensation.
Int. J. Adv. Robot. Syst. 2020,
17, 172988142091177.
[Google Scholar]
47.
Lukić B, Jovanović K, Šekara TB. Cascade Control of Antagonistic VSA—An Engineering Control Approach to a Bioinspired Robot Actuator.
Front. Neurorobot. 2019,
13, 69.
[Google Scholar]
48.
Aribowo W, Yamashita T, Terashima K, Masui Y, Saeki T, Kamigaki T, et al. Vibration Control of Semiconductor Wafer Transfer Robot by Building an Integrated Tool of Parameter Identification and Input Shaping.
IFAC Proc. Vol. 2011,
44, 14367–14373.
[Google Scholar]
49.
Kim H. Wafer Center Alignment System of Transfer Robot Based on Reduced Number of Sensors.
Sensors 2022,
22, 8521.
[Google Scholar]
50.
Pizarro-Lerma AO, García-Hernández R, Santibáñez VA. Fine-Tuning of a Fuzzy Computed-Torque Control for a 2-DOF Robot via Genetic Algorithms.
IFAC-Pap. 2018,
51, 326–331.
[Google Scholar]
51.
Fateh MM, Fateh S. Fine-tuning fuzzy control of robots.
Int. J. Robot. Res. 2013,
25, 977–987.
[Google Scholar]
52.
Trumić M, Jovanović K, Fagiolini A. Decoupled Nonlinear Adaptive Control of Position and Stiffness for Pneumatic Soft Robots.
Int. J. Robot. Res. 2021,
40, 277–295.
[Google Scholar]
53.
Liu S, Liu Z, Li Y, He W. Nonlinear Disturbance Observer-Based Direct Joint Control for Manipulation of a Flexible Payload with Output Constraints.
Int. J. Control. 2023,
96, 1377–1388.
[Google Scholar]
54.
You Z, Zhang W, Shen J, Ye Y, Ye X, Zhou S. Adaptive Neural Network Vibration Suppression Control of Flexible Joints Space Manipulator Based on H∞ Theory.
J. Vibroeng. 2023,
25, 492–505.
[Google Scholar]
55.
Rossomando FG, Soria CM. Discrete-Time Sliding Mode Neuro-Adaptive Controller for SCARA Robot Arm.
Neural Comput. Appl. 2017,
28, 3837–3850.
[Google Scholar]
56.
Phan VD, Vo CP, Ahn KK. Adaptive Neural Tracking Control for Flexible Joint Robot Including Hydraulic Actuator Dynamics with Disturbance Observer.
Int. J. Robust Nonlinear Control. 2024,
34, 8744–8767.
[Google Scholar]
57.
Son NN, Kien CV, Anh HPH. A Novel Adaptive Feed-Forward-PID Controller of a SCARA Parallel Robot Using Pneumatic Artificial Muscle Actuator Based on Neural Network and Modified Differential Evolution Algorithm.
Robot. Auton. Syst. 2017,
96, 65–80.
[Google Scholar]
58.
Chi J, Yu H, Yu J. Hybrid Tracking Control of 2-DOF SCARA Robot via Port-Controlled Hamiltonian and Backstepping.
IEEE Access 2018,
6, 17354–17360.
[Google Scholar]
59.
Wu MY, Liu YJ, Cai HG. Dynamic Analysis and Optimization for Wafer Handling Robot.
Adv. Mater. Res. 2014,
898, 657–662.
[Google Scholar]
60.
Di Matteo A, Masnata C, Pirrotta A. Simplified Analytical Solution for the Optimal Design of Tuned Mass Damper Inerter for Base Isolated Structures.
Mech. Syst. Signal Process. 2019,
134, 106337.
[Google Scholar]
61.
Ikago K, Saito K, Inoue N. Seismic Control of Single-degree-of-freedom Structure Using Tuned Viscous Mass Damper.
Earthq. Eng. Struct. Dyn. 2012,
41, 453–474.
[Google Scholar]
62.
Duc Phuc V, Tuan PN, Tran VT. Torsional Vibration Suppression for a High-Damped Rotor Using Dynamic Vibration Absorber Based on Weighted Dual Estimation of Equivalent Linearization Techniques.
Appl. Math. Model. 2024,
130, 774–789.
[Google Scholar]
63.
Thakadu K, Li K. A Passive Vibration Isolator Integrated a Dynamic Vibration Absorber with Negative Stiffness Spring.
J. Vib. Eng. Technol. 2022,
10, 71–82.
[Google Scholar]
64.
Zhao P, Fan Z. Design, Modeling, and Research on Vertical Performance of a Drive System with in-Wheel Motor as Dynamic Vibration Absorber.
Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2023,
237, 862–877.
[Google Scholar]
65.
Wang X, He T, Shen Y, Shan Y, Liu X. Parameters Optimization and Performance Evaluation for the Novel Inerter-Based Dynamic Vibration Absorbers with Negative Stiffness.
J. Sound Vib. 2019,
463, 114941.
[Google Scholar]
66.
Wang X, Liu X, Shan Y, Shen Y, He T. Analysis and Optimization of the Novel Inerter-Based Dynamic Vibration Absorbers.
IEEE Access 2018,
6, 33169–33182.
[Google Scholar]
67.
Silva LC, Savi MA, Paiva A. Nonlinear Dynamics of a Rotordynamic Nonsmooth Shape Memory Alloy System.
J. Sound Vib. 2013,
332, 608–621.
[Google Scholar]
68.
Li F, Wu H, Liu L, Ye Y, Wang Y, Wu P. Nonlinear Optimal Frequency Control for Dynamic Vibration Absorber and Its Application.
Mech. Syst. Signal Process. 2024,
223, 111932.
[Google Scholar]
69.
Wang Z, Wang C, Tomizuka M. Vibration Cancellation of Semiconductor Manufacturing Robots.
Manuf. Lett. 2015,
4, 6–9.
[Google Scholar]
70.
Hu Y, Chen MZQ. Performance Evaluation for Inerter-Based Dynamic Vibration Absorbers.
Int. J. Mech. Sci. 2015,
99, 297–307.
[Google Scholar]
71.
Baduidana M, Kenfack-Jiotsa A. Analytical H
2 Optimization for the Design Parameters of Lever-Type Stiffness-Based Grounded Damping Dynamic Vibration Absorber with Grounded Stiffness.
Arch. Appl. Mech. 2024,
94, 3229–3251.
[Google Scholar]
72.
Xing ZY, Yang XD. Parameter Optimization of a Two-Stage Quasi-Zero-Stiffness System with Linear Dynamic Vibration Absorber.
Nonlinear Dyn. 2024,
112, 11887–11907.
[Google Scholar]
73.
Tian M, Gao B. Dynamics Analysis of a Novel In-Wheel Powertrain System Combined with Dynamic Vibration Absorber.
Mech. Mach. Theory 2021,
156, 104148.
[Google Scholar]
74.
Li Y, Chang Y, Zhou J, Wang K. Dual Quasi-Zero-Stiffness Dynamic Vibration Absorbers for Double-Low-Frequency Vibration Suppression.
Int. J. Mech. Sci. 2024,
264, 108852.
[Google Scholar]
75.
Huang X, Hua X, Chen Z. Exploiting a Novel Magnetoelastic Tunable Bi-Stable Energy Converter for Vibration Energy Mitigation.
Nonlinear Dyn. 2024,
113, 2017–2043.
[Google Scholar]
76.
Jeon JE, Song WS, Hong SJ, Han SS. Predictive Maintenance System for Wafer Transfer Robot Using Gaussian Mixture Model and Mean-Shift Clustering.
Procedia Comput. Sci. 2024,
237, 453–460.
[Google Scholar]
77.
Yoo JH, Park YK, Han SS. Predictive Maintenance System for Wafer Transport Robot Using K-Means Algorithm and Neural Network Model.
Electronics 2022,
11, 1324.
[Google Scholar]
78.
Xiong W, Pan C, Qiao Y, Wu N, Chen M, Hsieh P. Reducing Wafer Delay Time by Robot Idle Time Regulation for Single-Arm Cluster Tools.
IEEE Trans. Autom. Sci. Eng. 2021,
18, 1653–1667.
[Google Scholar]
79.
Xiong W, Qiao Y, Wu N, Bai L, Chen M, Hsieh P, et al. Robot Waiting Time Analysis and Its Impact on Wafer Delay Time of Single-Arm Cluster Tools.
IFAC-Pap. 2020,
53, 384–389.
[Google Scholar]
80.
Roh DH, Lee TE, Martinez C. Kanban Feedback Control for Wafer Delay Regulation of Cluster Tools.
IEEE Trans. Autom. Sci. Eng. 2024, 1–17. doi:10.1109/TASE.2024.3455253.
[Google Scholar]
81.
Chou HH, Kung YS, Tsui TW, Cheng S. FPGA-BASED MOTION CONTROLLER FOR WAFER-HANDLING ROBOT.
Trans. Can. Soc. Mech. Eng. 2013,
37, 427–437.
[Google Scholar]
82.
Coman GC, Stan L, Ivan AM, Nicolescu AF, Verdete B. Programming and Wireless Control of a Wafer Manipulation SCARA Robot Using a Mobile Device.
IOP Conf. Ser. Mater. Sci. Eng. 2019,
591, 012074.
[Google Scholar]