Found 8 results
Opinion
22 August 2024Medical Drones for Public Health Emergency Preparedness, Response, and Resilience: Delivering Health for All
Amid a global metacrisis of health, environmental and economic challenges, medical delivery drones (or uncrewed aerial vehicles) offer a promising method to prepare for, and rapidly respond, to future emergencies. This opinion article summarizes the current medical delivery drone landscape, evidence base, and policy implications in the context of public health emergencies, such as pandemics, natural disasters, and humanitarian crises, with a particular emphasis on the region of sub-Saharan Africa. Using a multilateral, international health policy perspective, key challenges and opportunities, such as the development of sustainable funding mechanisms, robust regulatory frameworks, and capacity building, are identified.
Review
06 August 2024Considerations for Unmanned Aerial System (UAS) Beyond Visual Line of Sight (BVLOS) Operations
This paper, intended for expert and non-expert audiences, evaluates the technical and regulatory requirements for Unmanned Aerial Systems (UAS) to operate beyond visual line of sight (BVLOS) services. UAS BVLOS operations have the potential to unlock value for the industry. However, the regulatory requirements and process can be complex and challenging for UAS operators. The work explored the BVLOS regulatory regime in the UK, Europe and the US and found similarities in process and requirements covering themes like Detect and Avoid (DAA), Remote identification and Reliable Connectivity. A unifying goal across these jurisdictions is to operate BVLOS safely and securely in non-segregated airspace. However, operating BVLOS in segregated airspace as the default or routine mode could accelerate approval and adoption. The paper reviewed existing challenges, highlighting Coverage, Capacity and Redundancy as critical for UAS BVLOS Operations. The work also highlighted the crucial role of Non-terrestrial Network (NTN) assets like Satellites and HAPS (High Altitude Platform Station) since terrestrial networks (not optimised for aerial platform coverage) may not be reliable for BVLOS connectivity.
Review
02 August 2024A Promising and Forward-Looking Advancement Using Drones: Perspectives from Indian Sericulture
Drone integration in sericulture marks a promising advancement within the sector, leveraging recent technological strides in unmanned aerial vehicles (UAVs) across various industries like agriculture and healthcare. While the adoption of drones in sericulture remains nascent, their potential benefits, particularly in chemical spraying tailored to sericulture’s unique environmental conditions, are increasingly recognized. This paper explores the efficacy of drone-based pesticide spraying and smart fertilization methods optimized for sericulture settings. The rapid deployment capabilities of drones facilitate enhanced network connectivity, potentially catalyzing rural development and economic prosperity within the sericulture community. However, ethical and operational concerns persist regarding drone use across industries, necessitating robust regulatory frameworks and ethical guidelines. Furthermore, advancements in artificial intelligence augment drone capabilities, enabling automated inspections and improved performance across diverse applications. This paper underscores the need for further research and the development of standardized operating protocols to harness the transformative potential of drone technology in sericulture. Key focus areas include optimizing pesticide delivery, ensuring environmental sustainability, and addressing ethical considerations surrounding drone utilization. By leveraging UAVs for precision spraying and smart fertilization, sericulture stands poised to enhance productivity, bolster economic development, and navigate emerging challenges in agricultural production.

Article
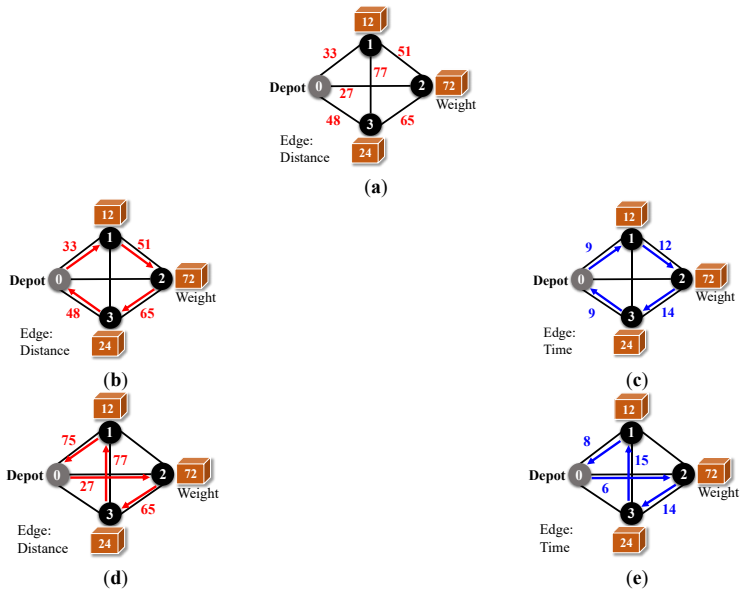
24 June 2024An Integer Programming Approach to Multi-Trip Routing of Delivery Drones at Load-Dependent Flight Speed
In recent years, there has been a growing interest in utilizing drones for parcel delivery among companies, aiming to address logistical challenges. However, effective optimization of delivery routes is essential. A theoretical framework termed the Flight Speed-aware Vehicle Routing Problem (FSVRP) has emerged to address the variability in drone flight speed based on payload weight. Several approximate methods have been proposed to solve the FSVRP. Our research endeavors to optimize parcel delivery efficiency and reduce delivery times by introducing a novel delivery problem. This problem accounts for multiple deliveries while considering the variability in flight speed due to diverse payloads. Through experimentation, we evaluate the efficacy of our proposed method compared to existing approaches. Specifically, we assess total flight distance and flight time. Our findings indicate that even in cases where the payload exceeds maximum capacity, all parcels can be delivered through multiple trips. Furthermore, employing a multi-trip FSVRP approach results in an average reduction of 10% in total flight time, even when payload capacities are not exceeded.
Article
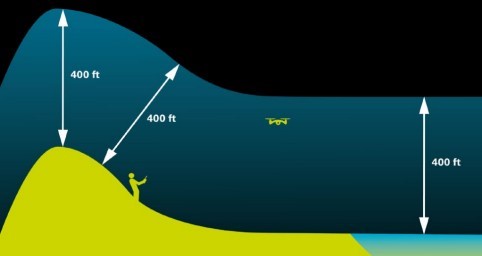
08 May 2024Assessing Drone Return-to-Home Landing Accuracy in a Woodland Landscape
While aerial photography continues to play an integral role in forest management, its data acquisition can now be obtained through an unmanned aerial vehicle (UAV), commonly referred as a drone, instead of conventional manned aircraft. With its feasibility, a drone can be programed to take off, fly over an area following predefined paths and take images, then return to the home spot automatically. When flying over forests, it requires that there is an open space for a vertical takeoff drone to take off vertically and return safely. Hence, the automatic return-to-home feature on the drone is crucial when operating in a woodland landscape. In this project, we assessed the return-to-home landing accuracy based on a permanently marked launch pad nested in a wooded area on the campus of Stephen F. Austin State University in Nacogdoches, Texas. We compared four models of the DJI drone line, with each flown 30 missions over multiple days under different weather conditions. When each drone returned to the home launch spot and landed, the distance and direction from the launch spot to the landing position was measured. Results showed that both the Phantom 4 Advanced and the Spark had superior landing accuracy, whereas the Phantom 3 Advanced was the least accurate trailing behind the Phantom 4 Pro.

Article
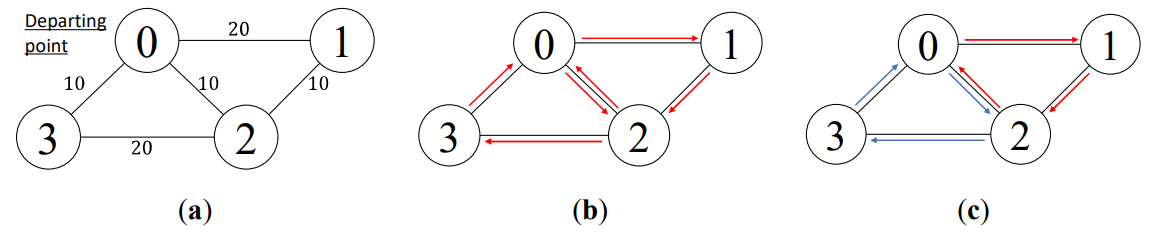
26 April 2024Exact and Heuristic Approaches to Surveillance Routing with a Minimum Number of Drones
The rising cost and scarcity of human labor pose challenges in security patrolling tasks, such as facility security. Drones offer a promising solution to replace human patrols. This paper proposes two methods for finding the minimum number of drones required for efficient surveillance routing: an ILP-based method and a greedy method. We evaluate these methods through experiments, comparing the minimum number of required drones and algorithm runtime. The findings indicate that the ILP-based method consistently yields the same or a lower number of drones needed for surveillance compared to the greedy method, with a 73.3% success rate in achieving better results. However, the greedy method consistently finishes within one second, whereas the ILP-based method sometimes significantly increases when dealing with 14 more locations. As a case study, we apply the greedy method to identify the minimum drone surveillance route for the Osaka-Ibaraki Campus of Ritsumeikan University.
Review
08 November 2023Review on Drone-Assisted Air-Quality Monitoring Systems
Drone-aided systems have gained popularity in the last few decades due to their stability in various commercial sectors and military applications. The conventional ambient air quality monitoring stations (AAQMS) are immovable and big. This drawback has been significantly overcome by drone-aided low-cost sensor (LCS) modules. As a result, much research work, media information, and technical notes have been released on drone-aided air quality and ecological monitoring and mapping applications. This work is a sincere effort to provide a comprehensive and structured review of commercial drone applications for air quality and environmental monitoring. The collected scientific and non-scientific information was divided according to the different drone models, sensor types, and payload weights. The payload component is very critical in stablility of the multirotor drones. Most study projects installed inexpensive sensors on drones according to the avilibility of the space on drone frame. After reviewing of multiple environmental applications the common payload range was 0 gm to 4000 gm. The crucial elements are addressed, including their relation to meteorological factors, air isokinetics, propeller-induced downwash, sensor mounting location, ramifications etc. As a result, technical recommendations for AQ monitoring assisted by drones are addressed in the debate part. This work will help researchers and environmentalists choose sensor-specific payloads for drones and mounting locations. Also, it enables advanced methods of monitoring parameters that help policymakers to frame advanced protocols and sensor databases for the environment and ecology.
