Temporary streams are a key component of the hydrological cycle in arid and semi-arid regions, but their flow is highly variable and difficult to measure. In this paper, we present a novel approach that could be used to assess the flow of temporary streams this allowing to characterize their environmental status. Specifically, we apply the Image Velocimetry (IV) method to estimate surface velocity in temporary streams using Unmanned Aerial Vehicles (UAVs) equipped with optical sensors (IV-UAV method). The IV-UAV method enables the easy, safe and quick estimation of the velocity on the water’s surface. This method was applied in different temporary streams in Lesvos Island, Greece. The results obtained indicate that the IV-UAV can be implemented at low discharges, temporary streams and small streams. Specifically, the water depth ranged from 0.02 m to 0.28 m, while the channel width ranged from 0.6 m to 4.0 m. The estimated surface velocity ranged from 0.0 to 5.5 m/s; thus, the maximum water discharge was 0.60 m3/s for the largest monitored stream of the island. However, there were many occasions that measurements were unable due to various reasons such as dense vegetation or archaeological sites. Despite of this, the proposed methodology could be incorporated in optical protocols which are used to assess the environmental status of temporary streams of Mediterranean conditions. Finally, this would become a valuable tool for understanding the dynamics of these ecosystems and monitoring changes over time.

Unmanned aerial vehicles (UAVs) have been used to establish flying ad hoc networks (FANETs) to support wireless communication in various scenarios, from disaster situations to wireless coverage extensions. However, the operation of FANETs faces mobility, wireless network variations and topology challenges. Conventional mobile ad hoc network and vehicular ad hoc network routing concepts have rarely been applied to FANETs, and even then they have produced unsatisfactory performance due to additional challenges not found in such networks. For instance, position-based routing protocols have been applied in FANET, but have failed to achieve adequate performance in large networks. Clustering solutions have also been used in large networks, but with a significant overhead in keeping track of the complete topology. Hence, to solve this problem, we propose a hybrid position-based segment-by-segment routing mechanism for clustered FANETs. This approach facilitates traffic engineering across multiple wireless clusters by combining position-based inter-cluster routing with a rank-based intra-cluster routing approach capable of balancing traffic loads between alternative cluster heads. Simulation results show that our solution achieves, on average, a lower power consumption of 72.5 J, a higher throughput of 275 Mbps and a much lower routing overhead of 17.5% when compared to other state-of-the-art end-to-end routing approaches.

In this paper, an autonomous system is developed for drone racing. On account of their vast consumption of computing resources, the methods for visual navigation commonly employed are discarded, such as visual-inertial odometry (VIO) or simultaneous localization and mapping (SLAM). A series of navigation algorithms for autonomous drone racing, which can operate without the aid of the information on the external position, are proposed: one for lightweight gate detection, achieving gates detection with a frequency of 60 Hz; one for direct collision detection, seeking the maximum passability in-depth images. Besides, a velocity planner is adopted to generate velocity commands according to the results from visual navigation, which are enabled to perform a guidance role when the drone is approaching and passing through gates, assisting it in avoiding obstacles and searching for temporarily invisible gates. The approach proposed above has been demonstrated to successfully help our drone passing-through complex environments with a maximum speed of 2.5 m/s and ranked first at the 2022 RoboMaster Intelligent UAV Championship.

In agriculture, medicine, and engineering, sudden fire outbreaks are prevalent. During such events, the ensuing fire spread is extensive and unpredictable, necessitating crucial data for effective response and control. To address this need, the current initiative focuses on utilizing an Unmanned Aerial Vehicle (UAV) with an Infrared (IR) sensor. This sensor detects and analyses temperature variations, accompanied by additional camera footage capturing thermal images to pinpoint the locations of the incidents precisely. The UAV’s programming is executed using Arduino-Nano and mission planner software, interfacing with the Pixhawk flight controller operating in a guided mode for autonomous navigation. The UAV configuration includes a radio module interfacing with Arduino-Nano, a flight controller, and remote-control functionality. The flight duration is approximately 10–15 min, contingent upon flight dynamics and environmental temperature. Throughout its airborne operation, the UAV transmits live telemetry and log feeds to the connected computer, displaying critical parameters such as altitude, temperature, battery status, vertical speed, and distance from the operator. The Pixhawk flight controller is specifically programmed to govern the UAV’s behavior, issuing warnings to the pilot in case of low voltage, prompting a timely landing to avert potential crashes. In case of in-flight instability or a crash, the mission planner can trace the UAV’s location, facilitating efficient recovery and minimizing costs and component availability losses. This integrated approach enhances situational awareness and mitigation strategies, offering a comprehensive solution for managing fire incidents in diverse fields.

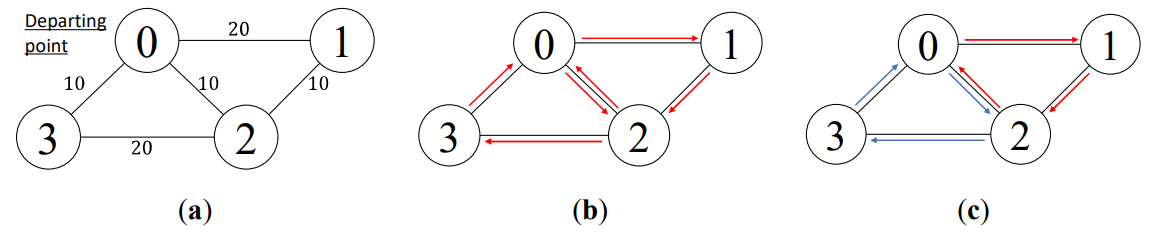
The rising cost and scarcity of human labor pose challenges in security patrolling tasks, such as facility security. Drones offer a promising solution to replace human patrols. This paper proposes two methods for finding the minimum number of drones required for efficient surveillance routing: an ILP-based method and a greedy method. We evaluate these methods through experiments, comparing the minimum number of required drones and algorithm runtime. The findings indicate that the ILP-based method consistently yields the same or a lower number of drones needed for surveillance compared to the greedy method, with a 73.3% success rate in achieving better results. However, the greedy method consistently finishes within one second, whereas the ILP-based method sometimes significantly increases when dealing with 14 more locations. As a case study, we apply the greedy method to identify the minimum drone surveillance route for the Osaka-Ibaraki Campus of Ritsumeikan University.