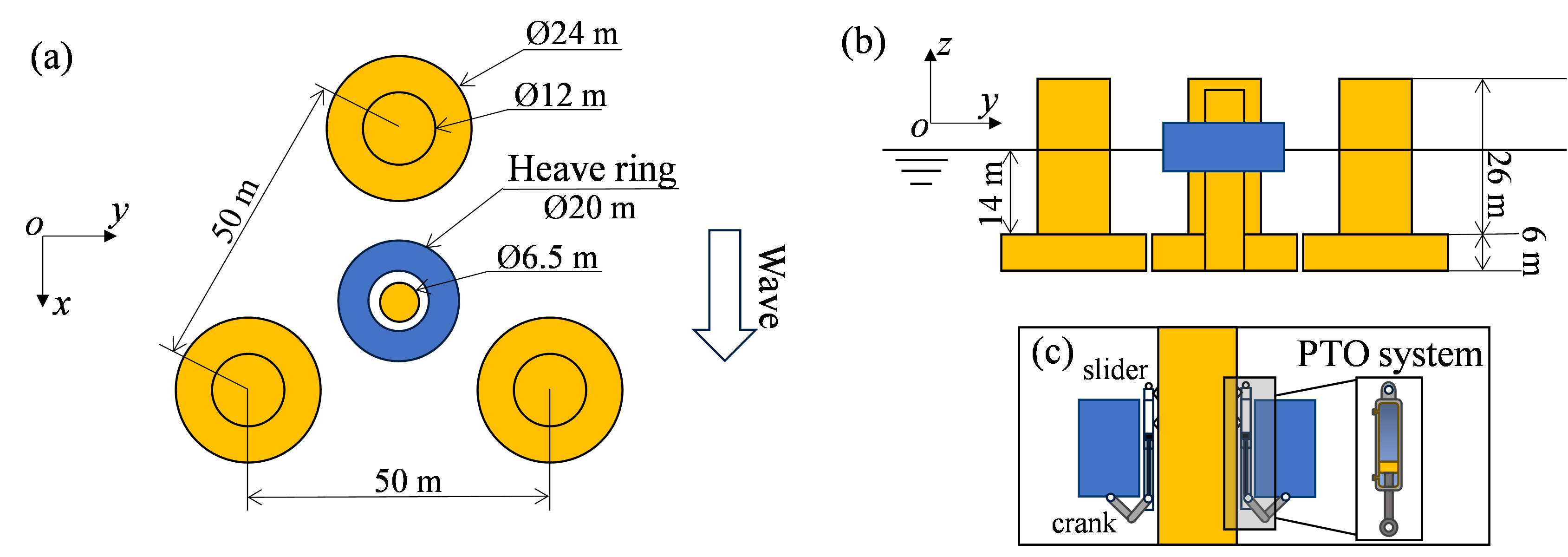
Mitigating wave-induced motions in floating multi-body systems is a critical challenge in ocean engineering. For single floating structures, such as floating platforms or vessels, applying active control requires considerable energy. It is also a common solution to add auxiliary structures and a power take-off (PTO) device, thereby forming a multi-body system that utilises passive control. However, the effectiveness of this method is limited due to varying phase differences between control forces and motions, which change across different wave frequencies. The present work proposes a novel semi-active structural control method, which can effectively provide optimised control force to the main body within a multi-body system. The key point of this method is tuning the phases between the forces and motions of floating bodies. Proper tuning can neutralise the main floating body’s wave-induced motion by utilising the wave-induced motion of the auxiliary structure. The controller is developed under an optimal declutching control framework, adjusting the damping coefficients of the PTO system to provide discrete resistance to the target body. A floating semi-submersible (SS) platform equipped with a heave ring as an auxiliary structure is selected and analysed as the case study. The results demonstrate the method’s efficacy in reducing motion for floating wind turbine (FWT) platforms and its applicability to various types of multiple floating bodies. Interestingly, our optimal declutching control can “kill two birds with one stone”. It can simultaneously enhance motion reduction and increase power capture. In the current study, the proposed controller achieved a maximum motion reduction of 30% for the platform.
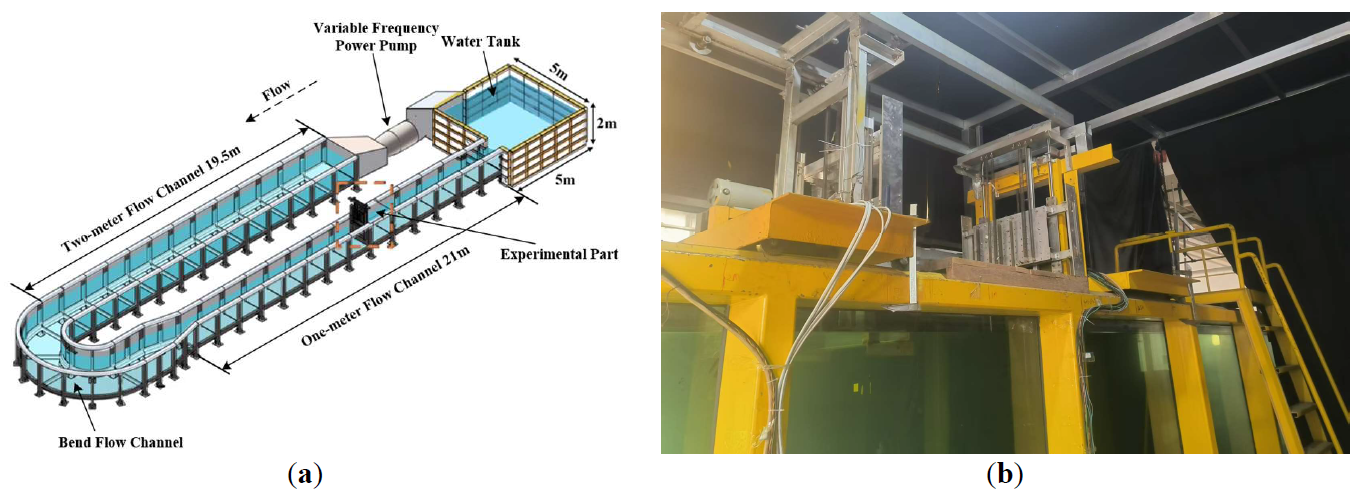
The research focuses on the flow-induced motion (FIM) and energy harness of “Cir-Tri-Att” oscillators (CTAO). The wake was photographed by particle image velocimetry (PIV) to explore wake structures. With the increase of the aspect ratios: the ability of oscillators to galloping under self-excitation or external excitation is enhanced. When ζ = 0.033, Ur = 12.5, the maximum amplitude ratio A* = 2.408 for oscillators with α = 1:1. Moreover, oscillators with higher aspect ratios can bear larger loads, which is conducive to energy utilization and conversion. The maximum power output Pharn = 16.588 W and the optimal efficiency ηharn = 24.706% appear in oscillators with α = 1.5:1. Additionally, In the soft galloping (SG), the wake mode is 4P or 3P. The wake vortex is more broken and its scale increases, but the force effect of the oscillators is better and the oscillation is more stable. The pressure difference makes for a longer oscillation period. This paper summarizes the FIM, energy harness and wake structures of the CTAO under different working conditions, which provides theoretical and data support for the optimization oscillators of flow-induced motion tidal energy conversion system.
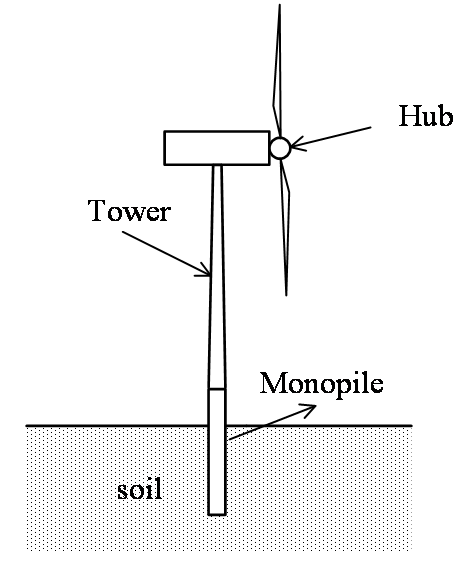
Vibration damping is essential for predicting the responses of wind turbines, and contributions mainly come from structural, soil, and aerodynamic damping. In engineering design, it is difficult to precisely account for the individual contributions of each damping source. As a result, a simplified approach is commonly used, where a total damping factor is applied that combines the effects of structural, soil, aerodynamic, and other damping sources. However, the accuracy of this simplified approach in predicting the dynamic response of turbines has not been thoroughly evaluated. This study primarily focuses on the applicability of vibration-damping simplification methods, particularly in analyzing the dynamic response of turbines under earthquake and wind loads.
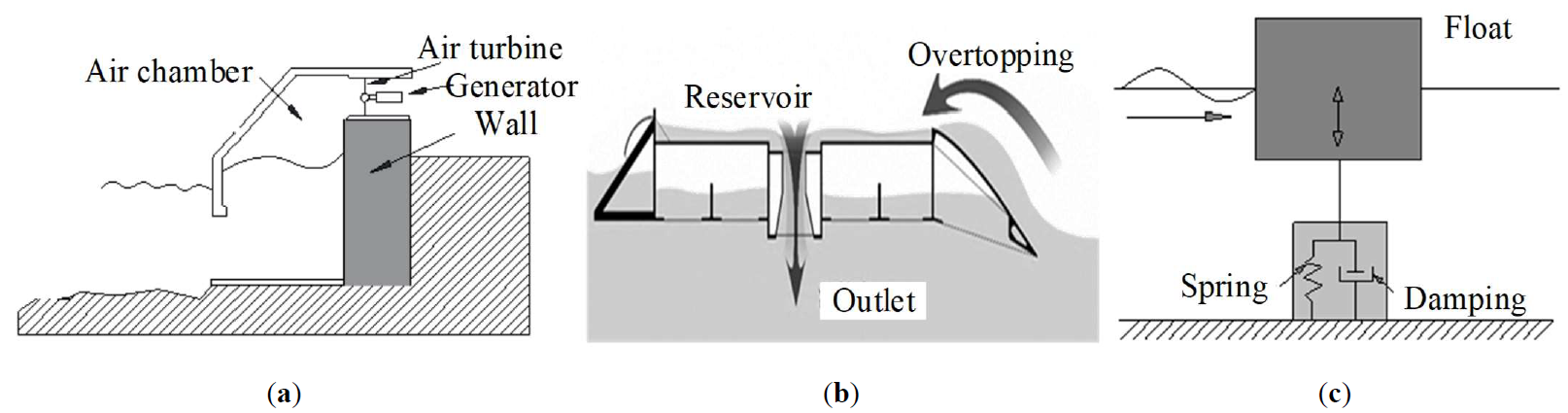
This paper reviews the advancements in wave energy converter technologies in China, covering device design, performance evaluation, and system control techniques. It highlights power control technologies in wave energy conversion, including adaptive control, model predictive control, clutch control, clamp control, resistive load control, approximate optimal speed control, nonlinear control, and intelligent control methods. Through an analysis of these technologies, the study outlines the future directions and challenges in wave energy development in China, while also proposing potential pathways for optimizing the performance of wave energy conversion devices.
Under the guidance of the dual carbon goals, the development and utilization scale of new energy in China, including photovoltaics and wind power, has steadily increased. Particularly, the floating photovoltaic technology in inland waters has been developing quickly over the past decade because it could compensate for certain shortcomings of traditional terrestrial photovoltaics. The offshore floating photovoltaic (FPV) pilot projects are also continuously emerging due to the advantages of longer daylight hours, higher radiation levels, and enhanced efficiency of light utilization in marine environments compared to terrestrial settings under identical solar irradiance conditions. To comprehensively understand the development prospects of offshore FPV systems, the development progress of FPV systems was traced, and an analysis was conducted on the forms of various types of floating structures, their technical characteristics, and their applicability in the marine environment. Summarization was carried out on the floating photovoltaic mooring system in terms of the classification of the mooring, the chain deployment mode, the form of the mooring foundation, etc., and a few new types of mooring systems were put forward. Finally, the development trend of the offshore FPV system was predicted.