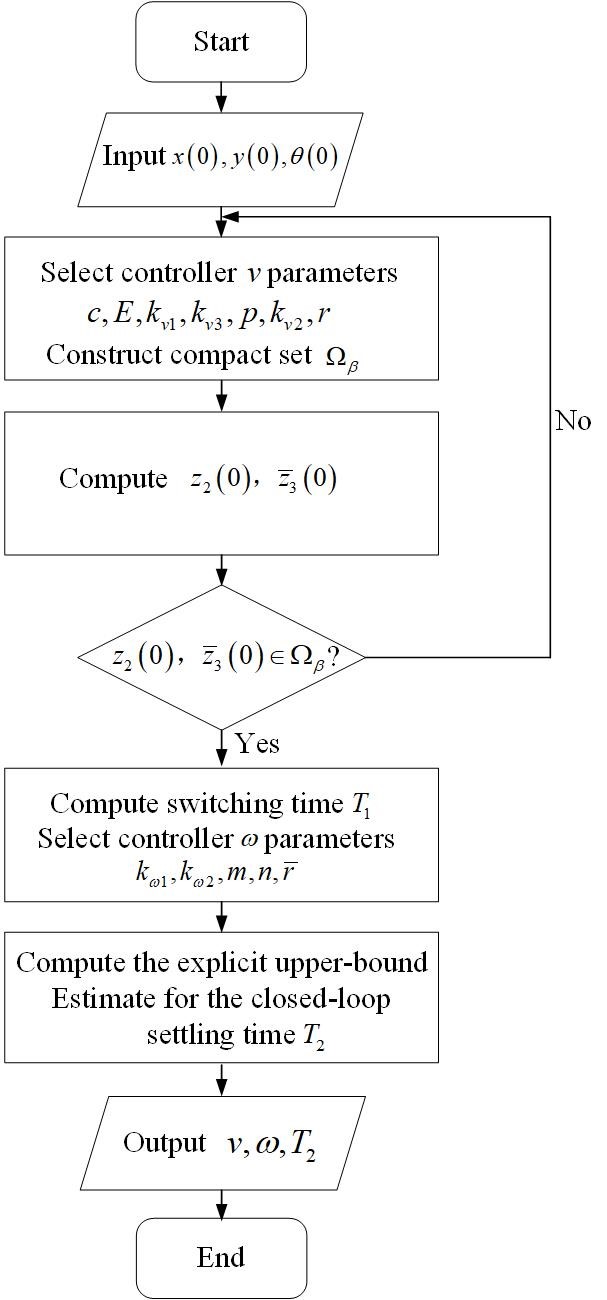
This paper addresses the finite-time stabilization problem for a nonholonomic wheeled mobile robot (NWMR) with input constraints. By utilizing the hyperbolic tangent function tanh(·), bounded finite-time stabilization controllers are developed. In addition, an explicit upper-bound estimate for the closed-loop settling time is given, and the level of input constraints is characterized by parameters that depend on the actuator’s capacity. A thorough finite-time stability analysis is carried out using appropriate Lyapunov functions. For a compact set contained in the domain of attraction, a guideline is presented to clarify how to construct it. Finally, simulation results show the effectiveness of the developed controllers.
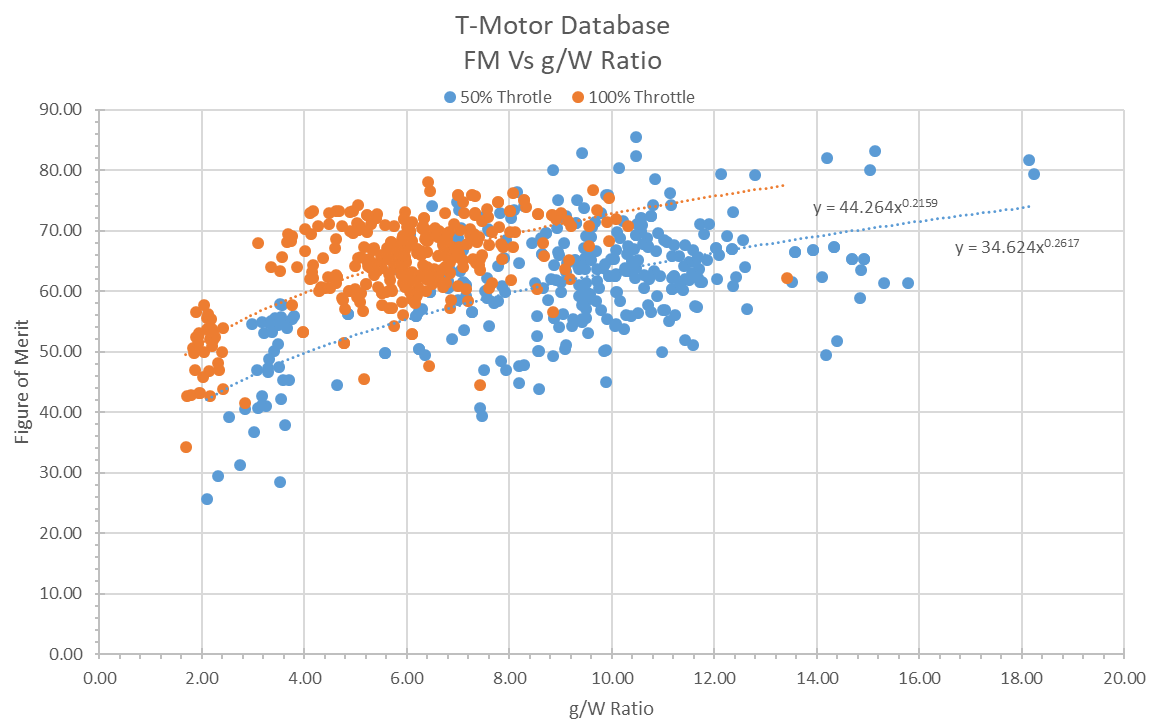
The behaviour of co-axial rotors is well understood, and they are especially practical for large UAVs due to their increased thrust without changing the vehicle footprint. However, for co-axial systems with varying propeller diameters between the two disks, research is more limited. The goal of this paper was to determine an optimal configuration for several different unequal co-axial setups using numerous different propeller combinations and separation ratios. Propellers with diameters of 26 and 29 inches are tested at separation ratios of 0.05 to 0.35. Thrust and power were collected using an off-the-shelf FS15-TYTO thrust stand, with the upstream and downstream propellers running at equal throttles. From this, performance was assessed through efficiency, thrust, and power consumption, and comparisons were made to an ideal combination without losses. The results show that for unequal combinations, the user should place the smaller propeller upstream for greater efficiency, but for maximum thrust capacity, two equal propellers are preferred. When compared to two independent rotors of the same size, a 26″ upstream rotor and a 29″ downstream rotor minimised thrust loss to 16%, compared to 23% for the opposite arrangement. It was also found that the optimal separation ratio is always approximately 0.2.
Due to the complex geometry of the monuments, it is often necessary to adapt the image collection process for their mapping. For the optimal mapping of the stronghold of Lazaritsa Chorygi (Greece) and its slopes, vertical, inclined, and horizontal images from different heights were collected using an Unmanned Aircraft System. Thus, for a monument of special archaeological/historical interest and natural beauty, a large set of high-spatial resolution data and final products (digital surface model and orthophotomosaic with spatial resolution 5.6 cm and 2.8 cm, respectively) is available. In addition, in the wider area of the fortified site, military structures (fire trenches, communication trenches, shelters, front and support trenches, and strong points) of the Great War length of 9 km were identified and mapped, which were identified in the 2003 or 2004 Google Earth Pro images, but worryingly are almost absent from the contemporary Google Earth Pro images.

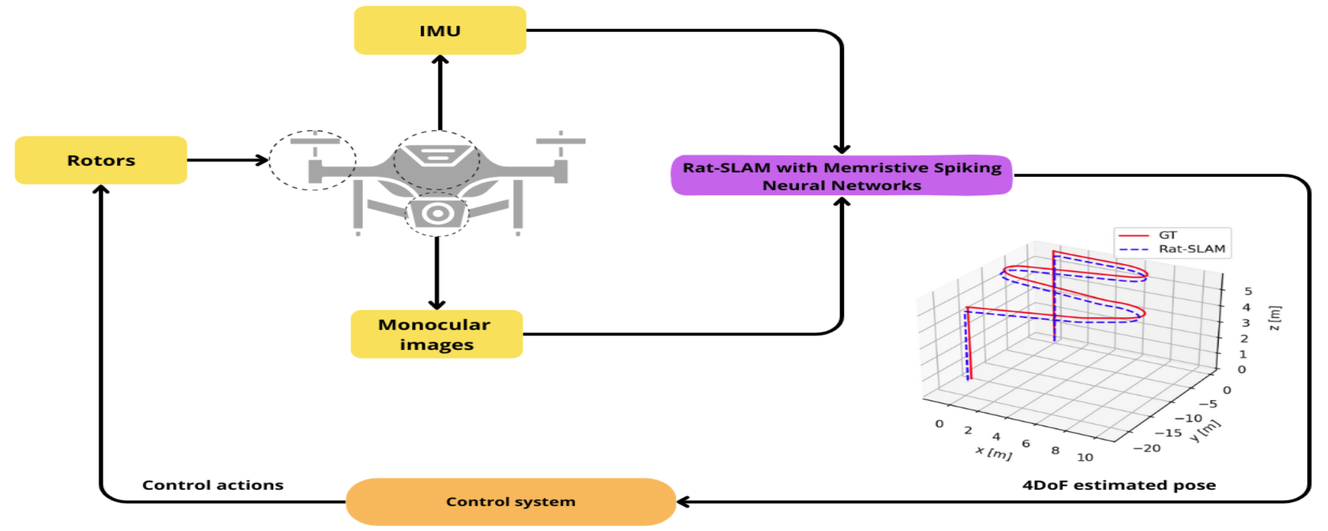
Unmanned Aerial Vehicles (UAVs) are versatile platforms with potential applications in precision agriculture, disaster management, and more. A core need across these applications is a navigation system that accurately estimates location based on environmental perception. Commercial UAVs use multiple onboard sensors whose fused data improves localization accuracy. The bioinspired Rat-Simultaneous Localization and Mapping (Rat-SLAM) system, is a promising alternative to be explored to tackle the localization and mapping problem of UAVs. Its cognitive capabilities, semi-metric map construction, and loop closure make it attractive for localization in complex environments. This work presents an improved Rat-SLAM algorithm for UAVs, focusing on three innovations. First, Spiking Neural Networks (SNNs) are incorporated into Rat-SLAM’s core modules to emulate biological processing with greater efficiency. Second, Neuromorphic Computing models the neurons of the SNNs, assessing the feasibility of implementing SNNs on specialized hardware to reduce software processing, a key advantage for UAVs with limited onboard resources. Third, SNNs are developed based on the Memristive Leaky Integrate-and-Fire model, integrating memristors into artificial neurons to leverage their low power and memory properties. Our approach was evaluated through trajectory simulations using the Hector Quadrotor UAV in the Gazebo environment within the Robot Operating System, yielding valuable insights and guiding future research directions.
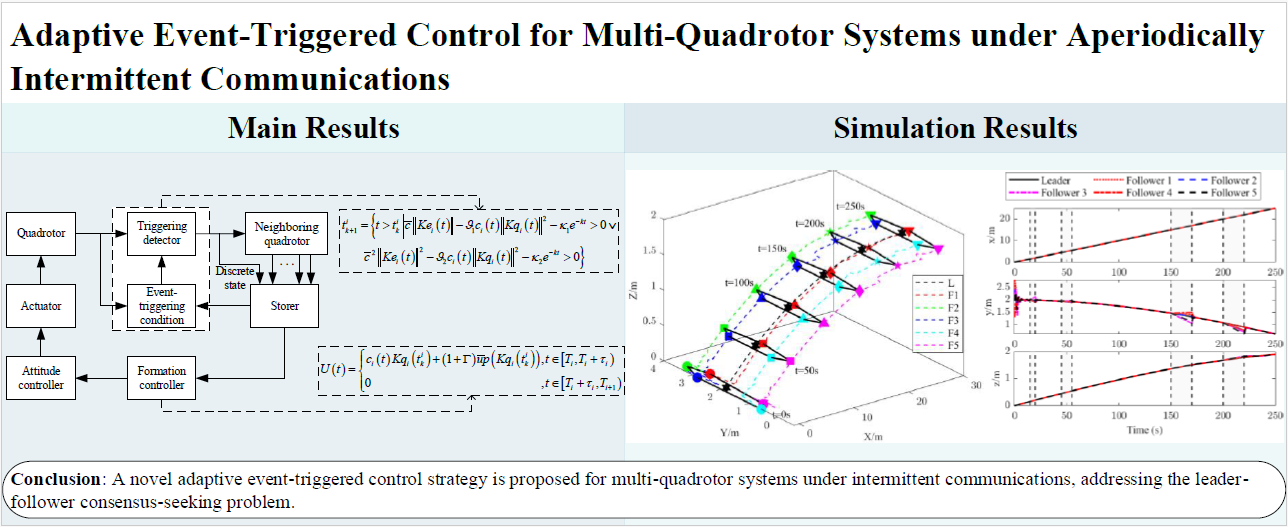
A novel adaptive event-triggered control strategy is proposed for multi-quadrotor systems under intermittent communications, addressing the leader-follower consensus-seeking problem where the leader has an unknown bounded input. Firstly, an activation time ratio condition is proposed, eliminating the reliance on the maximum time interval of intermittent communication. Secondly, a compensation term related to the leader’s unknown bounded input is designed in the controller to compensate for the error caused by intermittent communication in each period. Meanwhile, a prediction method is developed to eliminate the dependence on continuous information of neighboring quadrotors. Zeno behavior is strictly excluded, and communication among quadrotors is efficiently reduced with the designed event-triggering condition. Finally, numerical simulations verify the effectiveness and superiority of the proposed control strategy.